










 Custom services
Custom services Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
PermalinkINTRODUCCIÓN
En los años recientes, ha aumentado considerablemente el interés en la investigación de los efectos de la demora de tiempo en el comportamiento de los sistemas. Esto es debido a la existencia de retrasos en muchos tipos de sistemas, incluyendo los biológicos, económicos, sociales y de ingeniería. De manera general en el campo de la ingeniería del control, se aprecia que los retrasos siempre son perjudiciales y son la mayor causa de inestabilidad y disminución del margen de estabilidad (Dastan, 2019).
Aunque el control realimentado (convencional) es el tipo más comúnmente encontrado en la industria de procesos químicos, este no es el único. Existen situaciones donde el control realimentado es insuficiente para lograr la respuesta deseada en un proceso. En tales casos otras configuraciones de control son utilizadas; como en adelanto (feedforward), cascada, multivariable, rango dividido (split range) y control adaptativo… el control realimentado de sistemas con retardo de transporte o tiempo muerto grande y sistemas con respuesta inversa… para tales sistemas los controladores convencionales P, PI, o PID pueden no ser suficiente para lograr la respuesta deseada (Stephanopoulos, 2002).
Retardo de transporte
El retardo de transporte tiene un comportamiento de fase no mínima y tiene un retardo de fase excesivo sin atenuación en altas frecuencias. Estos retardos de transporte aparecen normalmente en los sistemas térmicos, hidráulicos y neumáticos (Ogata, 2010). En la siguiente figura se observa un sistema con retardo de transporte: Figura 1
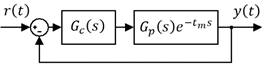
El control realimentado convencional podría proveer una respuesta a lazo cerrado poco satisfactoria por las siguientes razones (Stephanopoulos, 2002):
La perturbación en la entrada del proceso no es detectada en la salida hasta un significativo periodo de tiempo.
La acción de control se tomará en la base de la última medición, la cual será inadecuada porque los esfuerzos para regular la situación (eliminar el error) es originado por el retardo.
La acción de control también tomará el mismo tiempo en lograr que su efecto aparezca en la salida del proceso.
Como resultado de los factores anteriores, se observa que el retardo de transporte es una fuente significativa en la respuesta de los sistemas a lazo cerrado.
Problemas del control de sistemas con grandes tiempos muertos mediante realimentación de la salida: el controlador sigue actuando, aun cuando su salida sea adecuada para corregir el error cuando su acción tenga efecto sobre la salida, dando lugar a grandes oscilaciones e inestabilidad del sistema.
Control con Rechazo Activo a Perturbaciones para Procesos de Orden n
El Control con Rechazo Activo a Perturbaciones es una metodología relativamente nueva que posee un potencial interesante en la resolución de problemas de control de procesos industriales caracterizados por elevados niveles de incertidumbre. El ADRC como una solución potencial se ha explorado en varios dominios de ingeniería de control (Yi, 2014):
Sistemas de motor: el control de velocidad de motor de imán permanente síncrono y el motor inducción.
El control de vuelo: el mando de actitud de nave espacial y los vehículos de gran velocidad.
Control de robot: control de fuerza y coordinación de mano-ojo.
Procesos térmicos: los sistemas inestables de conducción de calor, los sistemas de caldera-turbina-generador, el gasificador de ALSTOM y en sistemas de orden fraccionario.
Dispositivos de electrónica de potencia: conversores de potencia DC a DC, rectificadores e inversores.
Sistemas de potencia: en los compresores de flujo axiales y en los motores de gasolina.
En las Figura 2 y Figura 3 siguientes se muestran ejemplos en los cuales se utiliza el ADRC (Yi, 2014):


El ADRC Fue propuesto por Jingqing Han, uno de los pioneros en la teoría de control y aplicaciones en China, en los años 1990. En 1997, Jingqing Han, Jiang Fangjun, Zhiqiang Gao realizaron la primera prueba exitosa en un servo mecanismo en la Universidad del Estado de Cleveland. Los sistemas lineales y los no lineales, bajo algunas condiciones, pueden transformarse en la forma canónica de cascada de integradores vía y realimentación (Yi, 2014):
El límite entre el sistema lineal y no lineal puede suprimirse por la entrada de control para los varios tipos de sistemas: lineal invariante en el tiempo o no lineal variante en el tiempo pueden transformarse hacia un sistema lineal de una cadena de integradores desacoplados vía control de entrada.
Las ideas:
Tratar al modelo desconocido del sistema: como un estado especial (Han, lo nombró el estado extendido).
Diseñar un observador especial: el observador de estado extendido (ESO), para estimar el sistema en tiempo real.
El potencial del control con rechazo activo a perturbaciones como una solución viable al control industrial, ha aumentado principalmente debido a su habilidad de rechazo a perturbación y su independencia de modelo matemático detallado de la planta. Con el controlador y el observador en ADRC principalmente determinado a priori por las especificaciones de la planta, y el orden de la planta conocido para la mayoría de los procesos industriales, el único parámetro que se necesita es la ganancia de la entrada que caracteriza la relación proporcional entre el signo de la señal de entrada y la variación de la salida del proceso (Madonski, 2015).
El ADRC fue originalmente propuesto para procesos de orden n, pero para el control la precisión del modelo del proceso es usualmente una dificultad y realizar un controlador de orden elevado con módulos simples en Sistema de Control Distribuido es engorroso, de aquí que en la práctica usualmente se prefiere un control de bajo orden… (Sun, 2016).
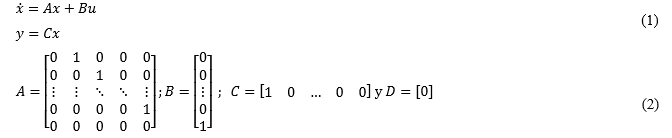
Ejemplo 1. Considere el siguiente sistema con múltiples entradas y múltiples salidas, no lineal, variante en el tiempo y con incertidumbres. Muchos sistemas de la ingeniería pueden ser descritos por ésta ecuación (Yi, 2014):

x i : Estados, u(t) ϵ R m .
y(t): Salida controlada, y(t) ϵ R m .
u(t): Entrada de control, u(t) ϵ R m ,
d(t): perturbación desconocida, d(t) ϵ R m .
f(x,t): Incertidumbres dinámicas, f(x,t) ϵ R m .
B(x,t):Matriz de entrada ϵ R mxm .
Considerando:

d(t): Perturbación externa.
 “Estado extendido” o “perturbación total” (no lineal o variante en el tiempo).
“Estado extendido” o “perturbación total” (no lineal o variante en el tiempo).
Escribiendo el sistema con su perturbación en una forma canónica:

Observador de estado extendido para estimar la perturbación total es de orden de la planta más uno.

Se proyecta la ley de control sin necesidad de un conocimiento exacto del modelo matemático, lo cual es un gran avance en la ciencia del control y la ingeniería. Para un proceso de orden dos se obtiene:
La esencia del ADRC: estimar la "incertidumbre total" mediante el ESO, estimando la influencia de las incertidumbres y de la perturbación en la salida sistema controlado para rechazar su efecto. La perturbación: afecta la salida (Yi, 2014).
Control con Rechazo Activo a Perturbaciones para Procesos con Retardo de Transporte
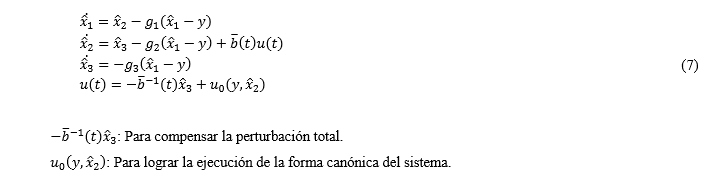
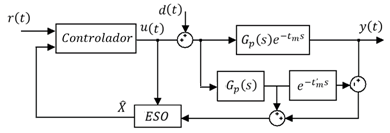
Basado en el ESO (7) para estimar la perturbación f y el sistema de estado X sin la demora de tiempo y en (Xinpeng, 2018), se utilizó el siguiente esquema:
Algoritmo del ADRC Utilizado
Se considera un sistema dinámico no lineal, variante en el tiempo, de segundo orden descrito por la ecuación diferencial (Teppa, 2012) y (Madonski, 2015):

Donde w es la perturbación externa, u es la entrada, y es la salida y b es una constante real del sistema que se conoce indirectamente a través del estimado b 0 . La expresión f (t ; y (t ); w(t)) o simplemente f representa la dinámica desconocida de la clase no lineal y variante en el tiempo que posee el sistema. Esto es, la única información que se requiere del sistema es su orden y el parámetro b0.
El principio en el que se apoya el ADRC consiste en la estimación y posterior cancelación de f. Asumiendo que f es derivable, el sistema (3) puede representarse en la siguiente forma de estado extendida:
Siendo g 1 ; g 2 y g 3 las ganancias del observador, las cuales se calculan de forma que el polinomio característico s3+ l1s2+ l2s + l3 sea Hurwitz. Por razones prácticas, todos los polos del ESO se localizan en w0, lo que resulta en:
Generalmente, mientras más elevada sea la ganancia del observador, más exacta será la estimación. Sin embargo, debe tenerse presente que las ganancias altas también incrementan la sensibilidad al ruido de medición. El ADRC cancelará el efecto de f empleando x3 a través de la ley de control:
Donde r es la señal de referencia, k 1 y k 2 las ganancias del controlador seleccionadas de forma que el polinomio s2+ k2s + k1 sea Hurwitz. En forma similar al diseño del ESO, los polos del controlador se suelen localizar en wc lo que origina:
Para determinar las frecuencias wc y wo se suele emplear como estimado inicial la relación heurística.

Al reemplazar (12) en (8) el sistema a lazo cerrado se transforma en:

Note que el primer término a la derecha de (15) es insignificante, por lo que el ADRC logra compensar el efecto de f en tiempo real.
Reglas para el Ajuste del ADRC
Las siguientes Reglas se utilizan para ajuste del ADRC: …se escoge el valor supuesto de b- alrededor de b, el cual será más grande con el aumento de retraso de tiempo τ. Las ganancias k (del controlador) no pueden ser demasiado grandes, porque llevaría a la oscilación del sistema. Los procedimientos para poner a punto los parámetros del control son los siguientes (Zhang, 2017):
Si el modelo es conocido, el valor de τ 0 y b- puede seleccionarse según τ y b; o pueden ponerse a punto basado en el análisis anterior.
Seleccione 1/τ como el valor inicial de inicial wc, y el valor inicial de wo puede ser de dos a diez veces mayor que el ancho de banda del controlador.
Incremente el valor de wo gradualmente manteniendo wc constante hasta que la señal del ruido sea haga difícil para cumplir con los requerimientos del sistema. De la misma manera, manteniendo constante wo, incremente hasta que la salida del sistema oscile; entonces disminuya wo e incremente wc continuamente. Acorde a esa manera, ajuste wo e incremente wc hasta lograr los requerimientos del control.
Si tiene mucha oscilación el seguimiento del proceso, se podría ajustar el valor de b-.
Normalmente entre mayor ancho de banda es mejor la ejecución. Mientras el costo es que el sistema es susceptible al ruido. Cuando el retardo de transporte no es exactamente conocido el ancho de banda no debe ser muy grande.
RESULTADOS Y DISCUSIÓN
A continuación, se utiliza en Control con Rechazo Activo a Perturbaciones para controlar procesos con demora de tiempo.
Ejemplo 2. Considere la siguiente la siguiente función de transferencia de una columna de destilación utilizada por (Alfaro, 2012), en la cual se utiliza el flujo de vapor para lograr el control del nivel del fondo, mediante un ADRC controle el sistema y muestre el comportamiento del mismo cuando los parámetros del proceso coinciden con los del predictor de Smith y una perturbación en la entrada, así como cuando el proceso tiene una diferencia de +20% y de -20%:
La perturbación d desde (0 hasta 200) s es igual a cero unidades y desde 200 s hasta los 300 s es igual a 0, 2 unidades.

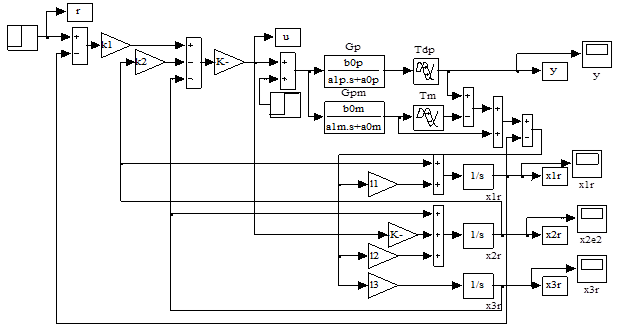
Utilizando el algoritmo mostrado desde las ecuaciones 8 a 15, el predictor de Smith y la Figura 4, se puede realizar el esquema de simulación que se ofrece a continuación:Figura 5
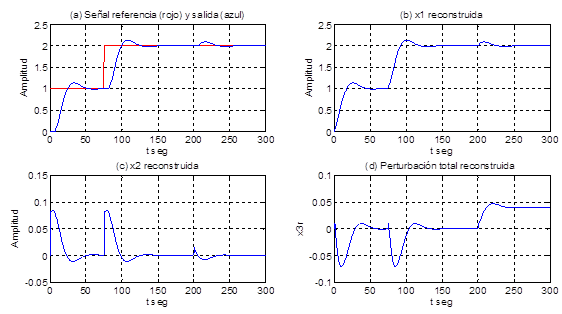
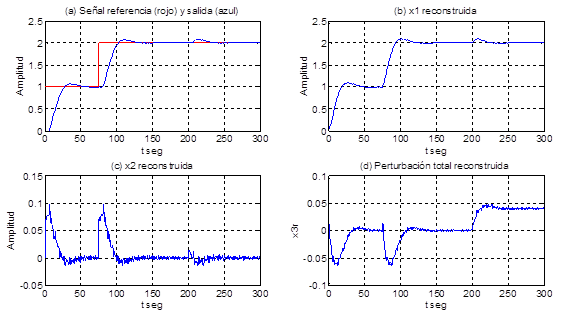
Se observa en la Figura 6 (para los mismos valores de los parámetros del proceso y del predictor de Smith) a) la señal de referencia y la salida de la planta, en b) la salida x1 reconstruida, en c) la salida de la planta x2 reconstruida, en d) la perturbación total; se aprecia en la figura a que el control es capaz de lograr un seguimiento asintótico de la señal de referencia con un sobrepaso menor que el 10% y el tiempo de establecimiento en menos de 50 segundos, en la figura b se observa que la señal x1 reconstruida es aproximada a la señal de salida de la planta, y en la figura c se aprecia que a los 200 segundos hay una perturbación que influye en el proceso con 0,04 unidades y el control es capaz de eliminar su efecto en menos de 50 segundos.
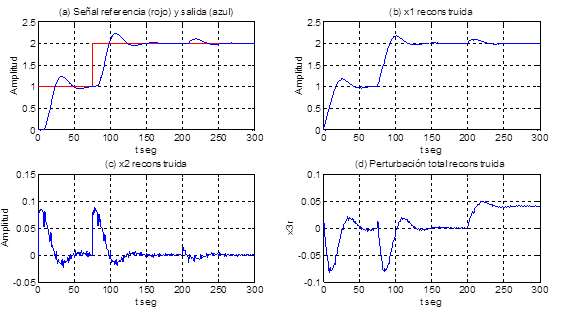
Se observa en la Figura 7 (para un aumento en los coeficientes a1, b0 y de la demora del proceso de un 20% y el predictor de Smith se mantiene igual al modelo del proceso) a) la señal de referencia y la salida de la planta, en b) la salida x1 reconstruida, en c) la salida de la planta x2 reconstruida, en d) la perturbación total; se aprecia en la figura a que el control es capaz de lograr un seguimiento asintótico de la señal de referencia con un sobrepaso menor que el 15% y el tiempo de establecimiento en menos de 75 segundos, en la figura b se observa que la señal x1 reconstruida es aproximada a la señal de salida de la planta, y en la figura c se aprecia que a los 200 segundos hay una perturbación que influye en el proceso con 0, 04 unidades y el control es capaz de eliminar su efecto en menos de 50 segundos.
Se observa en la Figura 8 (para una disminución en los coeficientes a1, b0 y de la demora del proceso de un 20% y el predictor de Smith se mantiene igual al modelo del proceso) a) la señal de referencia y la salida de la planta, en b) la salida x1 reconstruida, en c) la salida de la planta x2 reconstruida, en d) la perturbación total; se aprecia en la figura a que el control es capaz de lograr un seguimiento asintótico de la señal de referencia con un sobrepaso menor que el 10% y el tiempo de establecimiento en menos de 50 segundos, en la figura b se observa que la señal x2 reconstruida es aproximada a la señal de salida de la planta, y en la figura c se aprecia que a los 200 segundos hay una perturbación que influye en el proceso con 0, 04 unidades y el control es capaz de eliminar su efecto en menos de 50 segundos.
Ejemplo 3. Considere controlar el siguiente proceso con retardo de transporte mostrado por (Campoy, 2012), mediante un ADRC y mostrar el comportamiento del mismo cuando los parámetros del proceso coinciden con los del predictor de Smith, así como, cuando el proceso tiene una diferencia con el predictor de +20%, de -20% y en la entrada al proceso hay una perturbación tipo escalón a los 400 segundos:

Resultados de las simulaciones del ejemplo 3
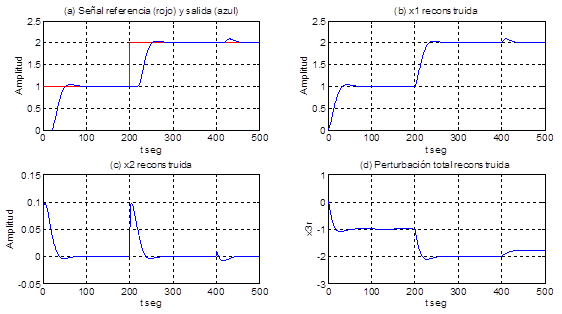
Se observa en la Figura 9 (para los mismos valores de los parámetros del proceso y del predictor de Smith) a) la señal de referencia y la salida de la planta, en b) la salida x1 reconstruida, en c) la salida de la planta x2 reconstruida, en d) la perturbación total; se aprecia en la figura a que el control es capaz de lograr un seguimiento asintótico de la señal de referencia con un sobrepaso menor que el 5% y el tiempo de establecimiento en menos de 65 segundos, en la figura b se observa que la señal x1 reconstruida es aproximada a la señal de salida de la planta, y en la figura c se aprecia que a los 400 segundos hay una perturbación que influye en el proceso con 0,2 unidades y el control es capaz de eliminar su efecto en menos de 50 segundos.
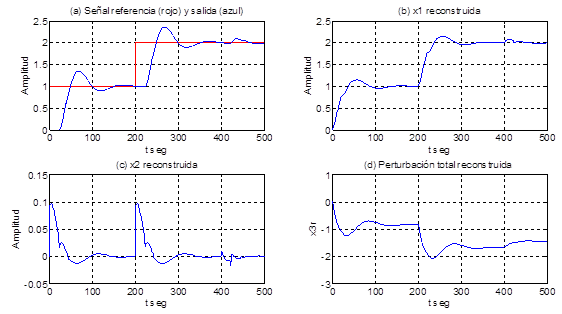
Se observa en la Figura 10 (para un aumento en los coeficientes a1, b0 y en la demora del proceso de un 20%, y el predictor de Smith se mantiene igual al modelo del proceso) a) la señal de referencia y la salida de la planta, en b) la salida x1 reconstruida, en c) la salida de la planta x2 reconstruida, en d) la perturbación total; se aprecia en la figura a que el control es capaz de lograr un seguimiento asintótico de la señal de referencia con un sobrepaso menor que el 35% y el tiempo de establecimiento en menos de 160 segundos, en la figura b se observa que la señal x1 reconstruida es aproximada a la señal de salida de la planta, y en la figura c se aprecia que a los 400 segundos hay una perturbación que influye en el proceso con 0,2 unidades y el control es capaz de eliminar su efecto en menos de 50 segundos.
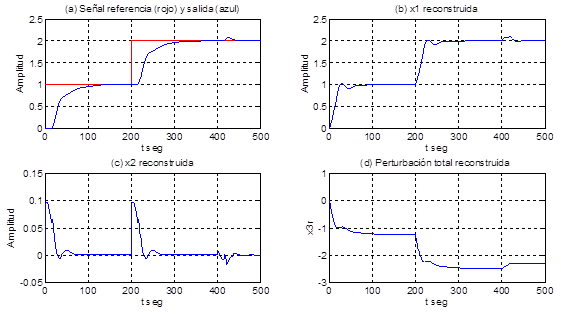
Se observa en la Figura 11 (para una disminución en los coeficientes a1, b0 y en la demora del proceso de un 20%, y el predictor de Smith se mantiene igual al modelo del proceso) en la figura a que el control es capaz de lograr un seguimiento asintótico de la señal de referencia sin sobrepaso y el tiempo de establecimiento en menos de 110 segundos, en la figura b se observa que la señal x1 reconstruida es aproximada a la señal de salida de la planta, y en la figura c se aprecia que a los 400 segundos hay una perturbación que influye en el proceso con 0,2 unidades y que el control es capaz de eliminar su efecto en menos de 50 segundos.
CONCLUSIONES
El Control Rechazo Activo a Perturbaciones utilizado se considera un sistema de orden n como si fuera de segundo orden de la forma 
es robusto, debido a que permite el control de procesos con variaciones de sus parámetros. Según se observa en los ejemplos 2 y 3.
posee dos parámetros de control, con los que se puede realizar ubicación de polos como un sistema de segundo orden. Observar ecuaciones (8) a (12).
se puede considerar que según los resultados obtenidos en los ejemplos 2 y 3, en las Figura 6, Figura 7, Figura 8, Figura 9, Figura 10, Figura 11 que el Control con Rechazo Activo a Perturbaciones mostrado en este documento capaz de controlar satisfactoriamente procesos con retardo de transporte del tipo estudiado.

