










 Servicios personalizados
Servicios personalizados Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkIntroducción
El desarrollo de la electrónica de potencia en la última década ha ido en ascenso, debido en gran parte por las necesidades y aplicaciones que requiere la vida moderna [1]. La industria y las investigaciones de los convertidores de potencia buscan ser más eficientes y a un menor costo, necesitando el rediseño de los modelos matemáticos para cumplir sus objetivos. Generalmente un modelo de un convertidor, no tiene en cuenta muchos de los aspectos que representan su comportamiento real y que comprometen en menor medida la eficiencia del mismo, o simplemente afecta en cierto orden el valor numérico de la respuesta, considerándose despreciables bajo ciertas condiciones. Esta reducción a un modelo más simple se debe a que el lazo de regulación compensa estos parámetros, no se conocen todos los datos requeridos o simplemente, para desarrollar en un menor tiempo, se excluyen estos detalles [2, 3]. Aquellos que están familiarizados con los temas de control, conocen que un modelo debe ser operativo y más fácil de estudiar que el propio fenómeno real.
Para obtener un modelo de un sistema dado, se desea que este sea simple, pero que a su vez cuente con los efectos más notables o de interés. Un modelo simple es más fácil de caracterizar, requiere generalmente de menor cantidad de recursos computacionales y agiliza su implementación. No solo basta conocer el modelo en detalles, sino que también sus restricciones a la hora de aplicarlo. Esto hace la diferencia entre los resultados válidos y un sinsentido a veces hasta creíble, pero técnicamente incorrectos. En ese sentido existen tres formas bien desarrolladas de modelar matemáticamente el comportamiento de los convertidores de potencia: las expresiones dinámicas, las funciones de transferencia y el espacio de estados. Los modelos matemáticos desarrollados por medio de expresiones (ecuaciones) dinámicas son fundamentalmente ecuaciones diferenciales ordinarias, es el método más tradicional y extensamente estudiado. Necesita de una comprensión profunda de los fenómenos físicos para poder obtener las expresiones que describen los fenómenos. Entre más complejo es el fenómeno que ocurre, más profunda tiene que ser la comprensión, por lo que esto es su principal desventaja.
Las funciones de transferencia son ampliamente usadas en el diseño de control, existiendo numerosa bibliografía al respecto. Los sistemas a modelar tienen que ser lineales e invariantes en el tiempo, de una entrada y una salida. Aunque fenómenos no lineales, pueden ser convertidos a lineales, ya sea reduciendo a un intervalo de operación que sea lineal o que la no linealidad sea despreciable. Los modelos de espacio de estados son los que más atención están teniendo actualmente. Sus características más notables son: puede poseer varias entradas y salidas, puede ser lineal o no y continuo o discreto. El modelo matemático también puede ser invariante o variante en el tiempo. Además de las variables de entrada y salida, existen las de estado. A diferencia de la función de transferencia, se conoce los aspectos internos del sistema directamente por el modelo. Es un método muy flexible, que permite modelar una amplia gama de fenómenos. Su utilización en la electrónica de potencia ha ganado terreno por sus ventajas sobre los demás métodos.
El presente trabajo está enfocado en el uso del modelo de espacio de estados en los convertidores reductores no aislados para su simulación en el dominio continuo del tiempo. Se estudia la validez de los resultados en función de su operación cercana o no al valor umbral de conducción continua/discontinua. La novedad de este trabajo es que se pueden juzgar los resultados de la simulación sin tener que realizar comparaciones futuras con otros modelos, métodos o programas de simulación independientes, a partir de un criterio de cercanía del punto umbral de conducción continua/discontinua y fiar las restricciones de valides del modelo aplicado al convertidor. La estructura del trabajo es la siguiente: se explica el modelo matemático de espacio de estados y su aplicación al convertidor reductor no aislado en la sección II. En la sección III está el análisis de los resultados de la simulación del modelo. Finalmente obtener las conclusiones en la sección IV.
Materiales y métodos
Un modelo matemático de espacio de estados es una representación de un fenómeno que se describe por medio de variables de entrada, salida y de estado, que están relacionadas por ecuaciones diferenciales en el dominio del tiempo. Lo anterior permite conformar un sistema de ecuaciones diferenciales en forma de matriz de primer orden [4]. Poder determinar el comportamiento del modelo ante cualquier estimulo de entrada, requiere de conocer el estado actual del sistema.
Las variables de estado son todas aquellas que contienen información del estado pasado del sistema. Hay tantas variables de estado como sea el orden del sistema. Generalmente a estas se les denota con x. Todas las variables de estado forman un vector de estado. En caso de ser el sistema continuo en el tiempo, el vector de estado es x(t). Hay que tener en cuenta que las variables de estado reflejan la cantidad de energía almacenada por el sistema.
Estas variables mencionadas anteriormente crean un espacio n-dimensional cuyos ejes de coordenadas corresponden a cada variable de estado. Un punto en el espacio, representa el estado completo del sistema en el instante de tiempo seleccionado.
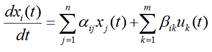
El modelo de espacio de estados necesita de dos ecuaciones para expresar el comportamiento interno del sistema o fenómeno: la ecuación de estado y la ecuación de salida. Para un sistema continuo en el tiempo, se puede expresar el comportamiento dinámico por medio de una ecuación diferencial de orden n (ver la ecuación (1)).
 (1)
(1)
Donde y son las variables de salida, u las de entradas del sistema, siendo entonces a y b sus respectivos coeficientes. La variable n es el orden de la ecuación diferencial y m identifica cada entrada.
Los métodos de representación en el espacio de estados, tienen la propiedad que siempre es posible representar un sistema de ecuaciones diferenciales de mayor orden, con un sistema de primer orden. Gracias a esta propiedad, en vez de usar una ecuación diferencial de n-ésimo orden, se transforma en n ecuaciones diferenciales de primer orden. Cada ecuación (2), diferencial de primer orden es:
 (2)
(2)
Siendo entonces la ecuación (3), de salida:
 (3)
(3)
Si se desarrolla la ecuación (2) para las n variables de estado en las ecuaciones (4), (5) y (6):
 (4)
(4)
 (5)
(5)
 (6)
(6)
Entonces las ecuaciones desde ((4),(5) y (6)) quedan como en (7), (8) y (9) respectivamente:
 (7)
(7)
 (8)
(8)
 (9)
(9)
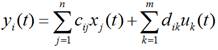
El sistema de ecuaciones diferenciales de primer orden puede ser transformado en una ecuación matricial como en la ecuación (10):
 (10)
(10)
La ecuación (10), es nombrada como la ecuación de estado del sistema, determinando el próximo estado en dependencia del estado actual y el aporte de la entrada. Se puede encontrar a la ecuación (10), en mucha de la literatura especializada como la ecuación (11). Las matrices A y B se llaman de estado y de entrada respectivamente.
 (11)
(11)
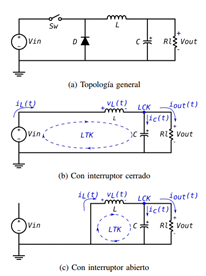
La salida (pueden ser varias) es una combinación lineal de las variables de estado. A partir de lo anterior, se comprende que puedan existir variables de estado que coinciden con las salidas. Para el caso de la ecuación (12), de salida, su forma matricial queda de la siguiente forma:
 (12)
(12)
Que también puede ser encontrada como en la ecuación (13):
 (13)
(13)
Siendo entonces las matrices C y D, de salida y transición directa respectivamente. La matriz de transición directa representa el acoplamiento entre la entrada y la salida. En muchos casos este acoplamiento no existe, por lo que la matriz D junto con el vector de entrada en la ecuación (13), es nulo, eliminando el término.
Otras ventajas de este método es que el sistema (simple o complejo), siempre es representado por las dos ecuaciones matriciales simples (11) y (13). Al ser todos los sistemas descritos por la misma notación matemática, se hace más fácil desarrollar técnicas generales para obtener las soluciones, al no tener que preocuparse por casos especiales. Para implementar la solución en una computadora, el procedimiento resulta cómodo y fácil, ya que los cálculos para sistemas de ecuaciones están extensamente desarrollados y documentados.
Modelo del convertidor reductor
Lo primero que se debe aclarar es el alcance del modelo del convertidor. Las siguientes restricciones del modelo son:
Los elementos se comportan de forma ideal.
La carga solo será una resistencia ideal.
El sistema es invariante en el tiempo.
La transferencia de energía es unidireccional en el convertidor.
El período de conmutación es T, con un tiempo dT para el interruptor cerrado. En el caso contrario, que el interruptor está abierto, entonces se está en el intervalo (1-d)T.
El convertidor opera en el modo de conducción continua para el estado estable.
Lo anterior permite simplificar el modelo matemático, eliminando los efectos que producen los parámetros parásitos en las formas de ondas y las pérdidas eléctricas [5, 6]. esencia hacen que la eficiencia sea la unidad. De esta forma es que generalmente se comienzan los estudios de los convertidores. Para el modelo matemático del convertidor se usará el espacio de estados [7], detallado anteriormente.
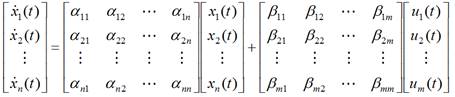
El convertidor reductor no aislado está conformado por dos elementos que almacenan la energía, un interruptor controlado, un interruptor no controlado, una fuente de entrada de corriente directa y la carga. En la figura 1(a), está el esquema que representa la topología del convertidor reductor no aislado. Este tipo de convertidor tiene dos regímenes típicos en su operación normal: cuando el interruptor Sw está cerrado y cuando está abierto.
Cuando el interruptor Sw está cerrado, el diodo se encuentra polarizado en inversa, por lo que su comportamiento es igual a tener resistencia infinita. Por lo tanto, se representa en la figura 1(b), el circuito equivalente del convertidor. En este se puede observar que la corriente de la fuente es la misma que la corriente del inductor, el cual está ganando energía, al igual que el condensador. Cuando el interruptor se abre, este produce la desconexión de la fuente Vin del resto del circuito, por ende, la fuente ahora no tiene corriente circulando. En la figura 1(c), se observa el circuito resultante cuando el interruptor está abierto, es importante aclarar que la energía almacenada en el inductor y el condensador es cedida a la carga.
El efecto de la apertura y cierre del interruptor controlado, genera el comportamiento variable en el tiempo, de la corriente y la tensión en la carga. Esta variación depende de los parámetros del circuito y de la carga misma. Entonces se presentan dos casos con respecto a la corriente de la bobina. Cuando la corriente en la bobina sea siempre mayor que cero en todos los intervalos de tiempo, se le llama a esto conducción continua del convertidor. El otro caso es el opuesto, que es cuando la corriente en la bobina es cero durante intervalos de tiempo, llamado entonces conducción discontinua. Esto separa el convertidor en dos modos de trabajo: conducción continua y conducción discontinua.
Se tiene entonces un punto umbral entre conducción continua/discontinua, identificado cuando la corriente mínima de la bobina es igual a cero, en un solo instante de tiempo en el período de conmutación. En la literatura especializada, se define para el estado estable, el valor mínimo de inductancia requerido para el punto umbral como lo determina la ecuación (14):
 (14)
(14)
Siendo  la frecuencia de conmutación y L
umbral
es valor mínimo de inductancia para conducción continua, o lo que es lo mismo, la inductancia que define el punto umbral entre conducción continua/discontinua. El análisis anterior es válido para el estado estable del convertidor. Con la frecuencia de conmutación constante, los cambios de carga y ciclo útil pueden producir que se pase de un modo de conducción al otro.
la frecuencia de conmutación y L
umbral
es valor mínimo de inductancia para conducción continua, o lo que es lo mismo, la inductancia que define el punto umbral entre conducción continua/discontinua. El análisis anterior es válido para el estado estable del convertidor. Con la frecuencia de conmutación constante, los cambios de carga y ciclo útil pueden producir que se pase de un modo de conducción al otro.
El modelo promedio de espacio de estado, entrega los resultados de la simulación por computadora con los valores medios de las magnitudes del circuito. Es útil particularmente para la etapa del diseño del control del convertidor.
Modelo promedio
Para obtener el modelo promedio, este se conforma con las expresiones de los dos intervalos de tiempo que diferencian el ciclo útil de la conmutación [8, 9, 10, 11]. Es decir, se obtienen las matrices A, B, C y D para ambos intervalos de tiempo, para el interruptor cerrado y para cuando está abierto. Entonces se suman las matrices para obtenerlas en su forma promedio como la ecuación (15):
 (15)
(15)
Lo mostrado en la ecuación anterior es válido sustituyendo A, por B, C o D. A partir de la aplicación de las Leyes de Kirchhoff se obtendrán dos expresiones para conformar el sistema de ecuaciones diferenciales. Para ello en la figura 1(b) está representada la trayectoria de la Ley de Tensión de Kirchhoff (LTK) y el nodo donde se aplica la Ley de Corriente de Kirchhoff (LCK), para el intervalo de tiempo con interruptor Sw cerrado. Vea ecuaciones (16) y (17).
 (16)
(16)
 (17)
(17)
Donde  . Por lo tanto, se representan en su forma matricial las ecuaciones (16) y (17), por la representación de las matrices de estados en la ecuación (18).
. Por lo tanto, se representan en su forma matricial las ecuaciones (16) y (17), por la representación de las matrices de estados en la ecuación (18).
 (18)
(18)
Para obtener las expresiones cuando el interruptor está abierto, se sigue el mismo procedimiento anterior, donde ahora se usa la figura 1(c). Cuando se tiene las ecuaciones matriciales de ambos estados del interruptor, se obtiene el modelo de espacio de estados promediado a partir de las mismas. Las matrices A y B promediadas están mostradas en las ecuaciones (19) y (20).
 (19)
(19)
 (20)
(20)
La ecuación de salida (13), tiene matrices C y D idénticas para ambos estados del interruptor, por lo que cuando esto ocurre, las matrices promediadas son iguales. Por consiguiente, se obtiene que la ecuación (21), de salida para el modelo promedio:
 (21)
(21)
De esta forma se definen las dos ecuaciones matriciales necesarias para el modelo promedio en espacio de estados del convertidor reductor no aislado.
Resultados y discusión
El modelo promedio en el tiempo fue implementado usando el software libre Scilab, que es para computación numérica, siendo un excelente programa a utilizar en investigaciones e ingeniería. El software Scilab está liberado bajo la licencia GPL.
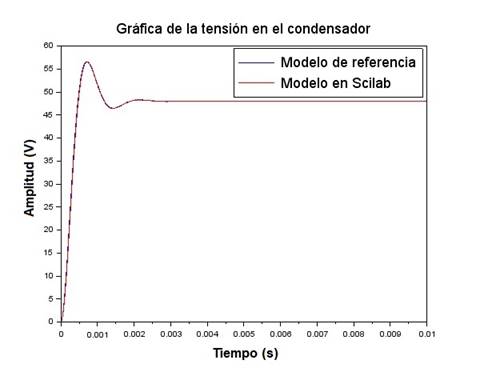
Los parámetros del convertidor son: V in = 70 V, V out = 48 V, L = 400 µH, C = 100 µF, f = 20 kHz, P out = 100 W. Con lo anterior se realizó una simulación para comprobar el modelo promedio contra un modelo de referencia de un tercero. Los resultados se muestran en las figuras 2 y 3, donde se puede observar que el modelo promedio se encuentra centrado en la forma de onda ondulada del modelo de referencia. Entonces se puede considerar que el modelo promedio es correcto para los parámetros del convertidor dado.
Para apreciar visiblemente los resultados, el barrido se muestra separado en dos gráficas con sus respectivos intervalos.

En la figura 4, se muestra la distribución del error relativo de la corriente por la bobina en el tiempo para el rango de valores de inductancias de 20 % - 40 % y el rango de 50 % - 100% en la figura 5. En estas se puede observar que a medida que la inductancia de la bobina se hace más pequeña y, por ende, se acerca al punto umbral de separación entre los modos de conducción continua y discontinua, el error relativo del modelo va en aumento. Al pasar el tiempo y llegar al estado estable del convertidor, el error tiende a ser cero. Esto significa que la etapa transitoria es la afectada por la cercanía del punto de operación del convertidor al umbral de conducción discontinua y continua.


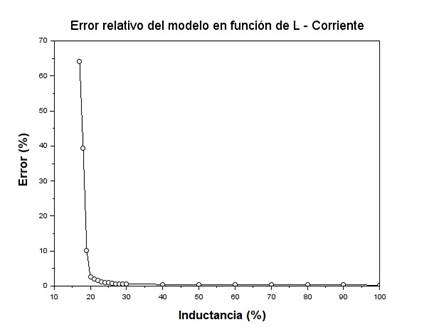
Un análisis del error relativo máximo para cada inductancia del barrido, muestra la curva del comportamiento del error. En la figura 6 se muestra dicho comportamiento y se incorporaron más muestras en la curva, en los lugares donde más cambios de pendiente hay. Hay presencia de un comportamiento lineal del error en el intervalo del 30 % en adelante de la inductancia, con una tendencia a disminuir. Aproximadamente entre el 20 % y el 30 % de la inductancia, se tiene un cambio que acelera el incremento del error a menor inductancia. Finalmente se obtiene un intervalo, entre la menor inductancia en el modo de conducción continua y el 20 %, que representa variaciones del error cada vez mayores, por cada variación de la inductancia. Es en este intervalo, donde más pronunciado es el aumento del error.
Al analizar a una inductancia de la bobina del 10 %, se observa un desplazamiento considerable del centro medio de la onda del modelo de referencia, en su intervalo transitorio. En este caso es obvio que no se tiene un modelo dinámico completo, sino que es un modelo parcial del comportamiento, válido solo en estado estable. Entonces solo es aplicable para perturbaciones muy lentas o análisis de estado estable. Estos resultados pueden ser observados en la figura 7.
La respuesta transitoria está tan alejada del modelo de referencia, que pone en dudas cualquier resultado de una implementación de un control. El mayor problema es que este tipo de situación se esconde, ya que para estado estable tiene un comportamiento adecuado, es en el accionar del control donde ocurren las discrepancias durante las perturbaciones. Esto es grave para la estabilidad del sistema. Autores han reportado que en un modelo promedio de espacio de estados, cuando se cierra el lazo de control, surgen problemas de estabilidad o se requiere de implementar un control no lineal.
Desarrollar un modelo promedio del convertidor reductor no aislado, en espacio de estados, para el modo de conducción continua; no es suficiente información para modelar el comportamiento transitorio. Entonces se puede hablar de dos valores de inductancia umbral: una inductancia mínima para estar en presencia de conducción continua para el estado estable del convertidor, y otra inductancia mínima (mayor que la anterior), que indica que el modelo promedio tiene una respuesta transitoria utilizable o válida.
Se debe entonces fijar un valor mínimo de inductancia de la bobina, que informe de la calidad de la respuesta transitoria del modelo promedio. Como identificación de este punto umbral, se recomienda la coordenada de inflexión de la pendiente del error. Un acercamiento de la figura 4, indica que la inductancia que corresponde al 20 %, tiene un error menor al 2.6 % y es el del cambio de pendiente. Asumiendo este valor de inductancia (Lss umbral ), como el punto umbral para transitorio.

El análisis para este caso de estudio reporta una relación entre Lss umbral /L umbral = 4.878, garantizando un error menor del 2.6 % en el comportamiento transitorio del convertidor modelado.
Conclusiones
En este trabajo se ha creado un modelo promedio en espacio de estados de un convertidor reductor no aislado.
La comparación del modelo desarrollado con el de referencia, demuestra que a medida que el punto de operación del convertidor se acerca a la condición umbral entre conducción continua y discontinua, el modelo paulatinamente pierde validez en su intervalo transitorio. Por esto, su futuro uso en diseños de control, ya no es posible bajo estas condiciones.
El estudio de caso permite obtener el valor de la inductancia umbral transitoria para el modelo promedio y su definición, como el valor de inductancia umbral para el punto de mayor cambio de pendiente del error, encontrándose entonces que para: L > Lss umbral = 4,878 L umbral , se garantiza un error menor al 2.6 % y la pertenencia de un modelo utilizable tanto para análisis transitorio como de estado estable, siendo esto, una novedad científica.

