










Mi SciELO
 Servicios personalizados
Servicios personalizadosServicios Personalizados
Articulo
 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkRevista Cubana de Investigaciones Biomédicas
versión On-line ISSN 1561-3011
Rev Cubana Invest Bioméd vol.36 no.2 Ciudad de la Habana abr.-jun. 2017
ARTÍCULO ORIGINAL
Biomecánica de la marcha atlética. Análisis cinemático de su desarrollo y comparación con la marcha normal
Biomechanics of the athletic walk. Kinematic analysis of its development and comparison with normal walk
Jorge Barreto Andrade,I Adoración Villarroya-Aparicio,II Santiago Calero MoralesIII
I Universidad de Cuenca. Ecuador.
II Universidad de Zaragoza. España.
III Universidad de las Fuerzas Armadas ESPE. Ecuador.
RESUMEN
Introducción: el propósito de la marcha atlética es trasladar el cuerpo a la mayor velocidad posible, conservando características similares a las de la marcha normal, debido a las exigencias del reglamento. Esto, junto a la búsqueda de velocidad, hace que el patrón de marcha parezca incómodo, forzado y antinatural.
Objetivo: analizar la movilidad articular de las extremidades superiores e inferiores, las inclinaciones y rotaciones de las cinturas escapular y pélvica, el desplazamiento del centro de gravedad y la prono-supinación del retropié en el desplazamiento de la marcha atlética y la normal.
Métodos: participaron 8 marchistas (4 hombres y 4 mujeres) con una edad media de 21,63 años (± 4,24). Se utilizó el sistema de análisis 3D ORTOBIO, las variables mencionadas se estudiaron en tres tomas, promediando tres ciclos.
Resultados: la duración del ciclo de la marcha atlética es menor que el de la marcha normal, principalmente por la menor duración de la fase de apoyo. Igualmente, los movimientos articulares, las inclinaciones y rotaciones son menores, lo que hace que el desplazamiento vertical del centro de gravedad corporal sea menos pronunciado; y la longitud de la zancada y la cadencia mayores, lo que contribuye al incremento de la velocidad.
Conclusiones: el artículo evidencia seis conclusiones generales que especifican las características del movimiento en la marcha atlética en comparación con la marcha normal, actualizando los análisis descriptivos y correlacionales existentes en la literatura internacional.
Palabras clave: cinemática; marcha atlética; marcha normal; biomecánica.
ABSTRACT
Introduction: The purpose of race-walk is to move the body at the highest possible speed, retaining characteristics similar to those of normal gait due to requirements of the regulation. This, together with the pursuit of speed, makes the running pattern seem uncomfortable, forced and unnatural.
Objective: to analyze joint mobility of the upper and lower extremities, inclinations and rotations of scapular and pelvic girdles, the displacement of the gravity center, and prone-supination of the hindfoot in the displacement of the walk race and the normal one.
Methods: Participants were 8 marchers (4 men and 4 women) with a mean age of 21.63 years (± 4.24). The ORTOBIO 3D analysis system was used, studying the variables mentioned in three attempts, averaging three cycles.
Results: The duration of athletic walking cycle is lower than that of normal walk, mainly due to shorter duration of the support phase. Likewise, the articular movements, inclinations and rotations are smaller, which means that the vertical displacement of gravity center (GC) is less pronounced, the length of stride and cadence being greater, contributing to the speed increase.
Conclusions: the article shows six general conclusions that specify characteristics of movement in athletic walk compared to normal walk, updating descriptive and correlational analyzes in the international literature.
Keywords: Kinematics; race-walk; normal walk; Biomechanics.
INTRODUCCIÓN
La marcha atlética, constituye un tipo especial y atípico de deambulación, con características biomecánicas propias.1 Este tipo de marcha, es definida como "una actividad deportiva en la que se realiza un desplazamiento paso a paso, en el cual hay que mantener un contacto constante con el suelo de al menos uno de los dos pies; además, el movimiento se realiza sin flexionar las rodillas, es decir, las rodillas se mantienen en extensión durante el paso del cuerpo por la vertical (apoyo simple)",2-4 debido a las reglas de competición. De ahí que López-Elvira J, Vera-García F, Maena M y García J5 señalen que el objetivo de la marcha atlética sea trasladar el cuerpo a la mayor velocidad posible, pero, el reglamento impone restricciones que hacen que mantenga características similares a las de la marcha normal.6-8 Estas restricciones, junto con la búsqueda de velocidad, hacen que el patrón de marcha parezca incómodo, forzado y antinatural.9,10
El reglamento de competición de la Federación Internacional de Atletismo Amateur (IAAF), en su Art. 230, define la marcha atlética, y dice: "es una progresión de pasos ejecutados de modo que el atleta se mantenga en contacto con el suelo, a fin de que no se produzca pérdida de contacto visible (a simple vista). La pierna que avanza debe estar recta, (es decir, no doblada por la rodilla) desde el momento del primer contacto con el suelo hasta que se halle en posición vertical",11 este aspecto reglamentado implica movimientos específicos del deportista, los cuales son analizados biomecánicamente para potenciar la técnica y por ende el rendimiento deportivo.12-14
Respecto a la fase de vuelo, varios autores afirman que hay una pérdida de contacto, que está entre 0,005-0,05 ms, en dependencia de la velocidad y del tipo de marchista, sin embargo, es imperceptible al ojo humano.9,3,15
El ciclo de la marcha atlética se considera el movimiento ejecutado por una sola extremidad inferior, desde el contacto del talón hasta el siguiente contacto del mismo talón. Así, en un ciclo completo, cada extremidad inferior pasa por dos fases:9,15
a) Fase de apoyo: tiempo en el que, el pie está en contacto con el suelo, y representa cerca del 50 % del ciclo.
b) Fase de oscilación: tiempo durante el que, el pie está suspendido en el aire, constituyendo alrededor del 50 % del ciclo.
Varios autores subdividen el ciclo en más fases. Castellano16 subdivide en:
a) Fase de apoyo doble.
b) Fase de tracción.
c) Fase de apoyo simple.
d) Fase de impulso.
Ozolin y Markov4 indican que en un ciclo completo hay una alternancia de apoyos con uno y con dos pies; es decir, dos periodos de apoyo simple y dos de apoyo doble.
En otra clasificación Castellano16 divide el ciclo en cinco fases: apoyo delantero, apoyo trasero, de doble apoyo, de impulso trasero, de impulso delantero, el movimiento apropiado de la cadera y la acción de brazos.
La técnica de la marcha atlética es similar a la de la marcha normal, pero más compleja en coordinación y efectividad. Su dominio es esencial, ya que una técnica eficaz y bien fijada, determina el nivel competitivo del marchista. Por lo tanto, el logro de altos resultados depende de una correcta técnica.17-19 El paso debe ser largo y económico, ya que un aumento excesivo de su longitud, lleva a la pérdida de energía, en detrimento de la técnica y de los resultados deportivos. En tal sentido, el objetivo de la investigación fue analizar la movilidad articular de las extremidades superiores e inferiores, las inclinaciones y rotaciones de las cinturas escapular y pélvica, el desplazamiento del centro de gravedad y, la prono-supinación del retropié en el desplazamiento de la marcha atlética y la normal.
MÉTODO
Se valoró a ocho marchistas de la Comunidad de Aragón-España, cuatro hombres y cuatro mujeres, con una edad media de 21,63 años ± 4,24, se les registró los movimientos articulares durante las marchas normal y atlética. Todos practicaban esta disciplina por varios años sistemática y continuamente, con experiencia en competiciones.
Por otra parte, se empleará los siguientes materiales:
a) Antropométrico: Balanza de precisión 100 g y tallímetro de precisión de 1 mm.
b) Pista sintética (tartán) de atletismo, de 400 m de cuerda, de la Universidad de Zaragoza-España.
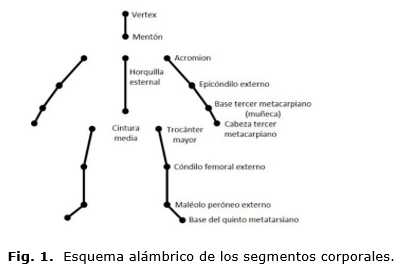
c) Sistema de análisis tridimensional ORTHOBIO, que consta de: dos cámaras, con velocidad de grabación de 25 fotogramas/segundo; calibrador, estructura de aluminio en forma de paralelepípedo, compuesta por varillas de 1,00 mm e interconectadas con esferas (vértices) recubiertas con laca blanca; marcadores, semiesferas de 1,5 a 2 cm de diámetro cubiertas de material reflectante; Hardware con tarjetas de captura y compresión de imágenes en movimiento; Software: módulos de captura, de digitalización (calibrador e imágenes mediante un esquema alámbrico que representaba el cuerpo o parte de él) y de análisis y representación gráfica (calcula las coordenadas de todos los puntos y realiza análisis cinemático en los tres planos).
Los resultados se exponen en tablas o representaciones gráficas en 2D: evolución de las variables en el tiempo, o en 3D: evolución del sujeto filmado y modelizado con un esquema alámbrico.
La prueba iniciaba con la toma de peso y estatura. Las cámaras se ubicaron en la salida de 100 m (ángulo de visión de 60º) para el registro del movimiento. La velocidad de obturación fue alta (1/1 000), se colocó el diafragma (iris) para reducir la luz natural, que al ser a campo abierto, era excesiva, de esta forma se redujo la luz y el color de las imágenes, pero se resaltaron los puntos saturados de luz.
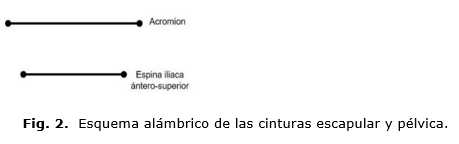
a) Plano frontal: vista anterior. El esquema de 20 puntos servía para valorar el comportamiento del CGC (Fig. 1). El de los acromiones y de las espinas ilíacas, serviría para determinar los movimientos de las cinturas escapular y pélvica (Fig. 2).
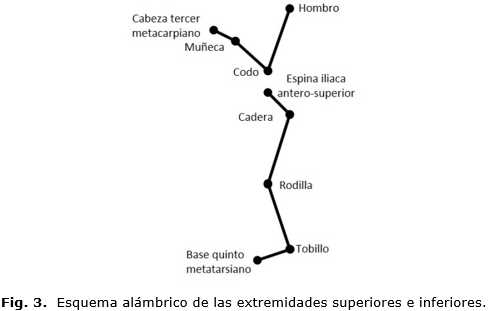
b) Plano sagital: derecho e izquierdo. El esquema de 9 puntos permitía conocer las variaciones angulares de las articulaciones de los miembros superiores e inferiores (Fig. 3).
Previamente, se filmó el calibrador de 1 000 x 1 000 mm, por donde pasaría el marchista, se digitalizaba su imagen (planos frontal anterior y sagital). Para obtener valores de referencia, se grababa al sujeto 10 s, en posición anatómica natural, en el sitio donde se filmó el calibrador.
La velocidad de marcha era la más próxima a la de competencia, se efectuaron tres grabaciones en cada plano: frontal: vista anterior, marchaba en dirección hacia las cámaras; sagital (derecho e izquierdo), marchaba por delante de las cámaras, saliendo de cada lado.
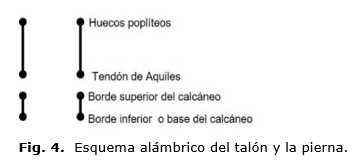
Luego, se grabó un calibrador (500 x 1 000 mm), para referencia en las tomas del plano frontal posterior, y estudiar la movilidad de la pierna, talón y prono-supinación del retropié, asociando un esquema de 8 puntos que representaban la pierna y el talón (Fig. 4). Se grabó al sujeto estático, por el plano frontal posterior, y luego marchaba, viniendo desde detrás de las cámaras, realizándose tres tomas de la pierna y pie en su zona posterior.
La digitalización fue manual, primero de las imágenes estáticas para obtener valores de referencia y, a partir de estos, valorar los movimientos dinámicos. Se dividió el ciclo en varios momentos: contacto de talón (CT), pie plano (PP), pie plano medio (PPM), despegue de talón (DT), despegue de la punta del pie (DP), mitad de la oscilación (MO) y contacto final de talón (CFT).
En el análisis estadístico se empleó el programa SPSS, se realizó una descripción de las tendencias centrales (medias), de las medidas de dispersión (desviación estándar, rangos, máximos, mínimos). Para determinar el tipo de distribución, se aplicó el test de Kolmogorov-Smirnov (Lilliefors), obteniendo valores de distribución no normal, aplicándose tests no paramétricos; el de Mann-Whitney, para la constatación de las variables halladas en la marcha atlética y el coeficiente de correlación de Pearson, para correlacionar los parámetros analizados.
La tabla 1 evidencia la duración de las fases de apoyo y oscilación, así como la distribución porcentual de la marcha atlética y la marcha normal. La media de la marcha atlética en cuanto a la variable "Apoyo" se estableció en 0,25 ± 0,03, siendo el valor menor que la media establecida en la marcha normal (0,61 ± 0,03). El resto de los valores medios estudiados fueron menores en todos los casos para la marcha atlética, con excepción de la media establecida en la oscilación con significación p < 0,0001.

La duración absoluta y relativa de las fases del ciclo de marcha atlética y de marcha normal (tabla 2) evidenciaron para la mayoría de los casos, que la marcha atlética posee menores indicadores medios que la marcha normal.
En la tabla 3 se evidencia los valores medios de la longitud de zancada (2,43 ± 0,12), la longitud de zancada corregida (1,44 ± 0,08), y la cadencia (198,21± 15,39).
Para el caso de la tabla 4, se evidencia los valores de la velocidad del CGC en los momentos del ciclo de la marcha atlética estudiados (m/s), estableciéndose la media en la variable contacto del talón (3,22; 0,43), pie plano (3,20; 0,44), pie plano medio (3,13; 0,35), despegue talón (3,17; 0,38), despegue punta (3,27; 0,39), mitad de la oscilación (3,13; 0,35) y contacto final talón (3,21; 0,40).
Cinemática de la marcha atlética
Los valores de movilidad de la cadera varían según las referencias tomadas. Algunos autores consideran el ángulo entre el fémur y la vertical, razón por la cual, elegimos estas referencias.
La tabla 5 complementa los datos relacionados con el valor angular de las articulaciones del miembro inferior en los diferentes momentos de la marcha atlética, y rango y valores de máxima flexión y extensión (grados), mientras que en la tabla 7 evidencia el valor angular de las articulaciones del miembro superior en los diferentes momentos de la marcha atlética y el rango y valores máximos y mínimos cuando el hombro está en máxima extensión, aspecto que se puede comparar con los datos dispuestos en la tabla 8, la cual evidencia los valores máximos de inclinación y de rotación de las cinturas pélvica y escapular durante la marcha atlética (grados).
En los marchistas (tabla 6), de inicio, la pierna (tibia) mostraba una ligera inclinación hacia abajo y hacia dentro de 5º-7º, por la tendencia a varo de rodilla. El contacto se produce con una inclinación de 6,82º, que continúa hasta alcanzar su máximo de 27,10º, tras apoyar toda la planta. Esta prominente inclinación parece deberse a la gran inclinación pélvica hacia el lado contrario, para intentar descender el CGC, en un momento en que tendería a estar más alto (tabla 9). Seguidamente, disminuye a 13º al pasar por la vertical, manteniendo valores similares hasta el despegue. El rango de movimiento es de 21,37º, mayor que en la marcha normal.
DISCUSIÓN
La duración del ciclo de marcha atlética es menor a la normal, alcanzándose mayor velocidad por un aumento de la longitud de la zancada y una mayor cadencia. La duración del ciclo de los marchistas, caminando normalmente era de 1 s (tabla 1), similar a la establecida por Cairns, Burdett, Pisciotta y Simon,9 y Murray, Guten, Mollinger y Gardner,15 que era entre 1 y 1,2 s; mientras que, en la marcha atlética fue de 0,61 s. Estos autores también describieron las diferencias entre los dos tipos de marcha, ellos encontraron duraciones entre 0,64-0,72 s respectivamente. La disminución se debe esencialmente al tiempo de apoyo, mientras que la oscilación disminuye respecto a la marcha normal solo en 0,036 s, pero con apoyo de 0,61 s; en la marcha normal pasa a 0,25 s con respecto a la atlética.
Esto hace que los porcentajes de apoyo y oscilación varíen, así de 60,97 % y de 39,03 % en la marcha normal, se pasa a 41,5 % y a 58,5 % en la atlética (tabla 1) para el apoyo y oscilación respectivamente, variaciones similares a las establecidas por Balius, Turro, Carles, Bonilla, y Cos,20 y mayores que las determinadas por Cairns, Burdett, Pisciotta y Simon9 y Murray, Guten, Mollinger y Gardner.15 Esto evidencia que los marchistas presentan una fase de vuelo de 0,004, muy breve e imperceptible al ojo humano.
La reducción del apoyo se debe a la disminución de la fase de pie plano, que llega al 6,27 % (tabla 2), similar dato al establecido por Sánchez,21 demostrando un traslado rápido de la carga del talón al antepié, impulsando rápidamente el cuerpo hacia delante.
La longitud de la zancada fue de 2,43 m, mayor que en la marcha normal (1,50-1,60 m). Esta depende principalmente de las características antropométricas,9,15,4 implicando valores entre 2,10 y 2,48 m, mientras que autores como Lafortune, Cochrane y Wright22 establecen dichos valores entre 2,49 y 2,63 m.
La cadencia fue de 198 pasos/min en los marchistas estudiados, casi el doble que en la marcha normal (100 y 120 pasos/min).23 Cairns, Burdett, Pisciotta y Simon9 aportan valores entre 163 y 182 pasos/min, mientras otros autores la establecen entre 180 y 200 pasos/min.4 Por otra parte, Hopkins24 sostiene que marchistas de élite tienen una frecuencia casi constante, alrededor de 190 pasos/min, parecida a los 198 obtenidos en el presente estudio.
La velocidad y la aceleración se valoraron analizando el desplazamiento del CGC. La velocidad es variable y depende de factores como: las características de los sujetos, si realizan entrenamiento o competición, si trabajan en pista o tapiz rodante, entre otros. En el estudio se alcanzó una velocidad de 3,19 m/s (tabla 4). Murray, Guten, Mollinger y Gardner15 dan una velocidad de 3,25 m/s y de 3,44 m/s, y otros autores, de 3,63 m/s9 y de 3,93 m/s.22 Si bien los últimos trabajos se realizaron con grupos mixtos, la mayoría eran varones; pero si analizamos únicamente los varones, los valores hallados estarían entre los aportados por estos autores.
En la marcha atlética (tabla 5) durante el contacto, la cadera tiene una flexión de 19,25º, superior a los 12º de la marcha normal,25 similar a lo establecido por Balius, Turro, Carles, Bonilla y Cos.20 Según Ornoch,26 la pronunciada flexión de la cadera durante el contacto es uno de los elementos técnicos más significativos en la marcha atlética, que junto con la rotación pélvica aumenta la longitud de la zancada. Conforme se avanza disminuye la flexión, y se extiende en el despegue y vuelve a flexionarse en la oscilación. La flexión máxima de 36º se da tras pasar la vertical, lo que junto a la importante flexión de la rodilla disminuye el momento de inercia del miembro inferior, aumentando su velocidad de avance. Su rango de movilidad se estableció en 43,84º, significativamente mayor al de la marcha normal.
Los marchistas contactan el talón con la rodilla en extensión (tabla 5), incluso con una ligera hiperextensión, manteniéndose o aumentando durante el apoyo. Al paso por la vertical alcanzan una extensión de 5,89º, y si analizamos individualmente algunos presentan una hiperextensión entre 8º-10º, similares a las establecidas por Cairns, Burdett, Pisciotta y Simon,9 y otros autores, entre 8º-9º.27 La hiperextensión es debido a las normas, que obligan a mantener la rodilla en extensión al pasar por la vertical.11 En el despegue del talón disminuye la extensión, que se invierte a una flexión durante el despegue del antepié (20,55º), alcanzando su valor máximo de 74,92º al paso por la vertical, valores semejantes a los establecidos por otros autores,9,27 y superiores a los de la marcha normal (60º y 70º).28 Su rango de movilidad fue de 86,64º.
Los marchistas (tabla 5) realizan el contacto de talón con una flexión dorsal del tobillo de 5,17º, cuya finalidad es alargar la longitud de la zancada; pero, en la marcha normal, contacta en posición neutra o en ligera extensión de 3º-5º.23 Luego se da una extensión de 3º, menor a la marcha normal (7º-12º)23 debido al rápido avance de la tibia, que cierra el ángulo pie-pierna. Invirtiéndose nuevamente a una extensión que se hace máxima (25º) tras el despegue del antepié, mayor que en la normal (15º-20º);29 y similar a los 24º establecidos por Cairns, Burdett, Pisciotta y Simon.9 Tras abandonar el suelo se da una ligera flexión durante la oscilación hasta el nuevo contacto. El rango de movimiento de esta articulación es de 40º (tabla 5), mayor a los 20-30º de la marcha normal.23
Según Estévez30 y Nigg,31 para cuantificar la prono-supinación del retropié, se valora el ángulo entre el segmento tibial y la parte posterior del retropié. De ahí que, la inclinación en el plano frontal de la tibia y del retropié, determine el grado de prono-supinación, siendo la inclinación del retropié la que más influye.
El retropié (tabla 6) contacta con una inclinación (12º) hacia abajo y hacia dentro que ayuda a la supinación. Luego, el ángulo del talón disminuye invirtiéndose ligeramente hacia abajo y hacia fuera durante el despegue del talón, para invertirse nuevamente en el despegue del antepié, momento en que alcanza su máximo valor (36,21º). El rango de movilidad del talón respecto a la vertical es significativo durante la marcha atlética (38,99º), siendo el principal responsable de la prono-supinación del retropié,30,31
El rango de la prono-supinación es significativo, de 45,79º (tabla 6). En el contacto el ángulo entre la pierna y el talón es de 174º (5,99º) en el sentido de la supinación, desde la posición de referencia de 180º. Nada más cargar para amortiguar, se invierte a una pronación de casi 10º que aumenta hasta su máximo de 22º antes del paso por la vertical (ángulo pierna-talón de 202º), que es importante para amortiguar el peso del cuerpo, pero no debe ser excesiva porque incrementa la probabilidad de lesiones,30 perdiéndose efectividad. Iniciado el despegue del talón, se invierte la pronación a una importante supinación que alcanza su máximo valor de 23º (ángulo pierna-talón de 158,90º) en el despegue del antepié. Frecuentemente los marchistas supinan mucho en el despegue, posiblemente por ir unida la supinación a la extensión de tobillo y pie que ayuda a alargar la zancada. Según Subotnick,32 un pie excesivamente supinado puede ser negativo, porque es inestable durante la propulsión y propenso a esguinces, o provoca problemas en la parte interna de la cadera y la rodilla; además, es perjudicial para la técnica porque la fuerza es aplicada en una dirección que no contribuye al desplazamiento hacia delante, perdiendo eficacia la marcha.31
En el contacto de talón (tabla 7), el hombro del mismo lado está en extensión, disminuyendo hasta invertirse a una flexión al pasar por la vertical, luego aumenta hasta el despegue del antepié, momento en que alcanza su máximo valor para extenderse nuevamente en la oscilación, logrando su máximo antes del nuevo contacto de talón. El rango de movimiento (114º) es similar a los 119º establecido en Murray, Guten, Mollinger y Gardner.15 Pero, existen diferencias entre los valores máximos de flexión y de extensión, esto puede deberse a que el estudio se realizó en pocos sujetos, o a las referencias tomadas, quienes aportan valores de 85º y 34º de extensión máxima y flexión máxima respectivamente. En el presente caso, fueron de 72,25º (máxima extensión) y de 41,91º (máxima flexión).
En la marcha normal, el rango de movilidad del hombro es de 30º-40º, que aumenta con la velocidad,23 aspecto confirmado por otros autores,15 quienes a marcha rápida describen rangos de 39º (31º de flexión y 8º de extensión), muy inferiores a los de la marcha atlética. La movilidad del hombro colabora en el impulso y, en el doble apoyo, cuando más bajo se encontraría el CGC, la gran flexión del lado del pie que despega y, la importante extensión del lado del pie que contacta, elevan el CGC, y a que sus oscilaciones verticales sean menores.
La marcha atlética se realiza con una evidente flexión de codo durante todo el ciclo, algunos autores han establecido valores de flexión de 90º (33,17), otros dan valores menores entre 80º-90º (34) y otros, mayores valores35 entre 90º-110º. Para el caso del presente estudio (tabla 7), en el contacto de talón el codo tenía una flexión importante de 82º durante el apoyo, que aumenta significativamente al iniciar el despegue del talón hasta su valor máximo de 103,68º en el despegue del antepié. Luego, en la oscilación disminuye hasta lograr su valor mínimo (61,35º) casi en la mitad, como indican otros autores.15 Su rango fue de 42,33º (tabla 7), mayor al dado por los autores citados (24º).
Murray, Guten, Mollinger y Gardner15 aportan un rango de 24º de flexoextensión de la muñeca. Los marchistas estudiados llevan todo el tiempo una ligera flexión con pequeñas oscilaciones en un rango de 20,85º (tabla 7).
En la marcha atlética, el rango de movilidad de inclinación pélvica en el plano frontal es mayor al de la marcha normal (5º-10º).23 En los marchistas estudiados el rango fue de 29,35º (tabla 8), superior a los 24,25º establecidos por Cairns, Burdett, Pisciotta y Simon,9 y semejante a los 28º de otros autores.15
Al contactar el pie la inclinación pélvica hacia el lado contrario es más baja, aumentando hasta su máximo de 14º (tabla 8) alrededor de la mitad del apoyo, que es cuando más alto tendería a estar el CGC (tabla 9). Luego disminuye hasta una posición neutra o se invierte al lado contrario, cuando comienza el despegue del antepié, inclinación que aumenta en el contacto del otro pie.
Según Hopkins,24 la importante inclinación pélvica unida a la inclinación del tronco, mantiene al CGC del marchista con escasas oscilaciones, disminuyendo el gasto energético, y dándose una correlación entre la inclinación (plano frontal) de la pelvis y el desplazamiento del CGC, a mayores inclinaciones pélvicas menores son sus desplazamientos.
La cintura pélvica presenta un rango de rotación de 37,88º (tabla 8), entre los 44º determinados en otras obras,15 y los 35,7º establecido por Cairns, Burdett, Pisciotta y Simon,9 mayores que en la marcha normal de 8º-10º.23 Según Marchetti36 el rango se cuadruplica, porque para alcanzar velocidad sin fase de vuelo (en teoría) es necesaria una gran zancada, ayudando a la gran rotación pélvica. Pero, no debe ser excesiva porque existe una relación inversa entre la rotación pélvica y la velocidad (a mayor rotación menor velocidad), debido a que a mayor rotación mayor descenso del CGC (tabla 9), en un instante que se necesita elevarlo para reducir sus oscilaciones.
La máxima oblicuidad de la cintura pélvica debería ser en el contacto de talón, que se correspondería con el despegue del antepié contrario, pero no es así, por la breve fase de vuelo. La oblicuidad disminuye a una posición neutra en el apoyo medio cuando el otro miembro inferior cruza la vertical, invirtiéndose hasta el nuevo máximo en el despegue de pie, y cerca al contacto del pie contrario (tabla 8).
Las inclinaciones de la cintura escapular (plano frontal) se producen en sentido contrario a las de la cintura pélvica. En el estudio se alcanza un rango de 21,53º (tabla 8), mayor que en la marcha normal que tiene un rango de inclinación de 4º-6º.25 En el contacto del pie, esta cintura se inclina hacia el lado del apoyo que aumenta en el apoyo completo del pie, logrando su valor máximo de 11º (tabla 8) cerca del paso por la vertical, momento en que el CGC tendería a subir, más aún considerando que la rodilla no se flexiona como en la marcha normal, sino que está extendida provocando la inclinación del tronco que, junto a la inclinación pélvica, hacen que descienda el CGC y sufra menores oscilaciones (tabla 9). En el despegue de talón, se mantiene o disminuye ligeramente esta inclinación que continúa, y en algunos casos, se invierte hacia el otro lado en el despegue del antepié, debido a que se encontraría próximo al contacto del otro pie, y por tanto los movimientos de inclinación serían los contrarios.
Las rotaciones de las cinturas escapular y pélvica son opuestas, arrastrando consigo a los miembros superiores. La sincronización de estos movimientos tiene como función absorber y contrabalancear las rotaciones, así coordinará y equilibrará la movilidad de las extremidades inferiores. Además, ayuda a disminuir el gasto energético durante la marcha atlética. Su rango es de 45,15º (tabla 8), superior a los 20º determinados en otros trabajos15 y, mayor al de la marcha normal de 7º y 11º.37,25 En el contacto de talón la hemicintura de ese lado está detrás; debería ser el momento de máxima oblicuidad y corresponder al despegue del antepié contrario, pero debido a la pequeña fase de vuelo en el contacto, ya habría despegado el otro pie y, ha disminuido ligeramente dicha oblicuidad. Así, su valor máximo se halla en el despegue de antepié. A partir del contacto de talón, conforme avanza el paso disminuye la oblicuidad, adoptando una posición neutra poco después del apoyo medio.
Las oscilaciones verticales del CGC durante la marcha disminuyen el gasto energético, debido a la producción de transferencias de energía; así, la energía potencial existente cuando está más alto se transforma en energía cinética al descender, siendo máxima en su punto más bajo, ayudando a que continúe el movimiento y vuelva a transformarse en energía potencial. Si estas oscilaciones son muy amplias, requieren excesivas fuerzas de aceleración y deceleración con un gran gasto energético.
Las oscilaciones verticales del CGC durante la marcha atlética son menores que en la marcha normal, 5 cm según Sutherland, Olshen, Cooper, y Woo,38 con valores de 3,73 cm en los marchistas estudiados (tabla 9). Analizando individualmente, se determina varios con oscilaciones de casi 3 cm e incluso uno con 2,42 cm, valores próximos a los 2,8 determinados en otras obras.15. Esta disminución ayuda a altas velocidades a rentabilizar el esfuerzo en una actividad fuerte de más de 2 horas de duración.20
Las oscilaciones laterales también se reducen para disminuir el gasto energético, estableciendo la literatura valores de 8 y 12 cm.15 Se encontraron para el presente estudio oscilaciones muy leves, con un rango de 3,61 cm, menores a las de la marcha normal (5 cm), gracias al genu valgo de la rodilla,38 que aproxima los puntos de apoyo disminuyendo las oscilaciones laterales, y por tanto el gasto energético.
Hablar de los parámetros que influyen en la efectividad de la marcha atlética es un tema complejo, dado que esta puede depender de la coordinación de varios de ellos. En el estudio se hallaron correlaciones entre algunos parámetros y la velocidad, tales como:
1) Entre la velocidad y el sexo, debido a las diferencias antropométricas que influyen en la velocidad y en la longitud de la zancada, existiendo correlación entre dicha longitud y el sexo.
2) La rotación de la pelvis tiende a alargar la zancada, dándose una correlación entre dicha rotación y la velocidad; así a mayor rango menor velocidad. De ahí que, una gran rotación pélvica desciende más el CGC (doble apoyo), el cual debe oscilar poco, tratando de seguir una trayectoria casi horizontal para disminuir el gasto energético, siendo la marcha más efectiva. En el despegue del pie, el CGC tendería a estar más bajo, se requiere de elementos para subirlo dándose una correlación positiva entre la posición del CGC en el eje vertical y la velocidad; así cuanto más sube mayor es la velocidad. Por ello, la mayor rotación pélvica ayuda a alargar la zancada, pero "dentro de unos límites".
3) Tras el contacto del talón, se produce una pronación que es máxima, casi al paso por la vertical, colaborando en la amortiguación de la carga de todo el peso. Pero, una pronación excesiva puede causar problemas en las estructuras musculares y tendinosas,39 y disminuir la efectividad de la marcha, dándose una correlación negativa; así, a mayor pronación, en este momento, menor es la velocidad. No existe una relación directa entre la velocidad y la supinación del retropié, pero si una tendencia a que, a mayor supinación menor sea la velocidad; sin embargo, sí encontramos relación con la inclinación del talón hacia abajo y hacia dentro, factor que influye significativamente en la supinación, así, a menor velocidad mayor inclinación del talón. Subotnick32 afirma que la supinación permite al pie convertirse en una palanca que impulsa hacia delante, apoyándose en los dedos, pero que un pie excesivamente supinado es inestable durante la propulsión y propenso a esguinces. Por otra parte, Nigg31 confirma que supinaciones excesivas en el despegue del pie, además de ser negativo para la técnica, porque la fuerza es aplicada en una dirección que no favorece al movimiento hacia delante, son causa de problemas tendinosos (tibial anterior, tibial posterior, tendón de Aquiles). Así, a menor rango de prono-supinación del retropié mayor es la velocidad.
4) En el miembro superior, la única correlación positiva con la velocidad la encontramos en el grado de flexión del codo durante el despegue del pie del mismo lado, cuando el miembro superior está adelantado con la mayor flexión del hombro y del codo; así, a mayor flexión mayor es la velocidad. La importante flexión del codo disminuye el radio de movimiento de la extremidad superior en su recorrido hacia atrás, reduciéndose su momento de inercia y, produciéndose un movimiento más rápido, con lo que se logra mayor impulso.
Por lo anteriormente expuesto, se concluye que:
1) La duración del ciclo de la marcha atlética es significativamente menor al de la marcha normal, debido a la disminución del tiempo de apoyo, tras el apoyo del talón se produce un desplazamiento rápido de la carga al antepié.
2) La distribución porcentual de las fases de apoyo y oscilación se invierte respecto a la marcha normal, de 41,5 % y 58,5 % respectivamente, evidenciándose que, a pesar de las normas de competición y de no apreciarse a simple vista, hay una breve fase de vuelo (0,04 ms).
3) La longitud de la zancada es de 2,43 m, pero varía por las diferencias antropométricas; esta, y la cadencia (198 pasos/min) son las responsables de la velocidad.
4) La velocidad está correlacionada con los desplazamientos verticales del CGC. Cuanto más baja el CGC (paso por la vertical), cuando tendería a estar más alto por la gran inclinación pélvica hacia el lado contrario y, la inclinación escapular hacia el mismo lado; y, cuanto más sube (doble apoyo), cuando tendería a estar más bajo por la gran flexión del hombro adelantado y la extensión del hombro retrasado, mayor es la velocidad.
5) Al pasar por la vertical hay una hiperextensión de la rodilla que apoya (5,9º), resultado de la reglamentación mientras que en el miembro inferior oscilante existe una importante flexión de cadera y rodilla, que disminuye su momento de inercia, favoreciendo su avance.
6) El importante rango de movimiento del hombro (41,9º de flexión y 72,2º de extensión) colabora en el ascenso del CGC en el doble apoyo. Por otra parte, el importante rango de rotación de las cinturas escapular y pélvica ayuda a disminuir el gasto energético, almacenando energía elástica en los movimientos oblicuos del tronco. Además, la rotación pélvica contribuye al incremento de la longitud de la zancada y de la velocidad, evidenciándose una relación inversa de este parámetro con la velocidad, probablemente porque si la rotación es excesiva desciende más el CGC (doble apoyo), cuando hay que elevarlo, lo cual disminuye la velocidad de la marcha.
Agradecimientos
Al equipo de investigación de las carreras de Cultura Física e Ingeniería de la Universidad de Cuenca.
Conflicto de intereses
Los autores declaran que no poseen ningún tipo de conflicto de intereses, ni financiero ni personal, que puedan influir en el desarrollo de esta investigación.
REFERENCIAS BIBLIOGRÁFICAS
1. Barreto J, Villarroya A, Contreras T, Brito V, Loaiza E. Biomecánica de la marcha atletica. Análisis de las presiones plantares durante su desarrollo, revisión actualizada. Lecturas: educación física y deportes. 2016;21(217):1-15.
2. Damilano S. La marcia. Atleticastudi. 1983;2:53-91.
3. Jeudy S, Marrone N, Archambault M. Faisons de la marche athétique. Track and Field Journal. 1994;4:13-4.
4. Ozolin N, Markov D. Atletismo. T 1. 3ra. ed. La Habana: Científico-Técnica; 1991.
5. López-Elvira JL, Vera-García F, Maena M, García J. Análisis biomecánico del apoyo plantar en la marcha atlética. Relación entre la huella plantar, ángulos de la articulación subastragalina y presiones plantares. European Journal of Human Movement. 2008;20:41-60.
6. Pavei G, Cazzola D, La Torre A, Minetti A. The biomechanics of race walking: Literature overview and new insights. European journal of sport science. 2014;14(7):661-70.
7. Tartaruga MP, Brisswalter J, Peyré-Tartaruga LA, Ávila OV, Alberton CL, Coertjens M, et al. The relationship between running economy and biomechanical variables in distance runners. Research Quarterly for Exercise and Sport. 2012;83(3):367-75.
8. Hanley B, Bissas A, Drake A. Kinematic characteristics of elite men's 50 km race walking. European journal of sport science. 2013;13(3):272-9.
9. Cairns M, Burdett R, Pisciotta J, Simon S. A biomechanical analysis of racewalking gait. Med Sci Sports Exerc. 1986;18(4):446-53.
10. Park H, Branson D, Petrova A, Peksoz S, Jacobson B, Warren A, et al. Impact of ballistic body armour and load carriage on walking patterns and perceived comfort. Ergonomics. 2013;56(7):1167-79.
11. IAAF. Internacional Amateur Athletic Federation (IAAF). [Online]; 2015. Available from: http://www.iaaf.org.
12. León S, Calero S, Chávez E. Morfología funcional y biomecánica deportiva. 2nd ed. Quito: Editorial de la Universidad de las Fuerzas Armadas ESPE; 2016.
13. Zhang B, Yue H. Bio-mechanical mathematical model analysis for race walking technique. International Journal of Applied Mathematics and Statistics. 2013;44(14):469-76.
14. Lee JB, Mellifont RB, Burkett BJ, James DA. Detection of illegal race walking: a tool to assist coaching and judging. Sensors. 2013;13(12):16065-74.
15. Murray P, Guten G, Mollinger L, Gardner G. Kinematic and electromyographic patterns of olympic race walkers. Am J Sports Med. 1983;11(2):68-74.
16. Castellano R. Evaluación biomecánica de la marcha atlética, en atleta de la selección del estado de Carabobo. Biomecánica del ejercicio y los deportes. 2010;5:17-28.
17. Marín F. Marcha. Atletismo 1 carreras y marcha. Madrid: Real Federación Española de Atletismo; 1998. p. 399-419.
18. Sovenko SP, Budkevych HB, Lytvynchuk T. Technical specifications of qualified sportswomen who specialize in race walking for 10 km. Physical education of students. 2014;18(4):37-41.
19. Berlanga LA. La marcha atlética. Síntesis de medios y aspectos metodológicos para su entrenamiento. Lecturas: educación física y deportes. 2011 Octubre;16(161):1-8.
20. Balius X, Turro C, Carles J, Bonilla E, Cos M. Marcha humana vs. marcha atlética. Rev Med Cir Pie. 1995;6:27-36.
21. Sánchez-Lacuesta J. Biomecánica de la marcha humana normal. Biomecánica de la marcha humana normal y patológica. Valencia: Instituto de Biomecánica; 1993. p. 19-112.
22. Lafortune M, Cochrane A, Wright A. Selected biomechanical parameters of race walking. Exel. 1989;5(3):15-7.
23. Perry J, Davids JR. Gait analysis: Normal and pathological function. Journal of Pediatric Orthopaedics. 1992;12(6):815.
24. Hopkins J. The biomechanics of race walking. Athletics Coach. 1981;15:22-7.
25. Nerín S. Análisis de la marcha en escalera. Tesis doctoral. Universidad de Zaragoza, Zaragoza: Facultad de Medicina; 1997.
26. Ornoch E. Technique de la marche athlétique Ottawa: Track an Field Journal; 1980.
27. White S, Winter D. Mechanical power analysis of the lower limb musculature in race walking. International Journal of Sports Biomechanics. 1985;1(1):15-24.
28. Inman V. Human Locomotion. Canadian Medical Association Journal. 1966;94(20):1047-54.
29. Piéra J, Grossiord A. La marche. Encycl Med Chir Kinésithérapie. 1975;4(02): 26013.
30. Estevez M. Variaciones del ángulo del tendón de Aquiles durante la carrera y su influencia sobre el pie Galicia: Centro Galego de Documentacións e Edicións. INEF; 1993.
31. Nigg B. Biomechanics as applied to sports. In Nigg B. Oxford Textbook of Sports Medicine. Oxford: University Press; 1994. p. 94-111.
32. Subotnick S. Lesiones en el deporte y el ejercicio físico: terapias convencionales homeopáticas y alternativas Madrid: Edimundo; 1994.
33. Campra E. Las pruebas de marcha. Atletismo 1, carreras y marcha. Madrid: Real Federación Española de Atletismo; 1990. p. 259-83.
34. Álvarez del Villar C, Durán J. Atletismo Básico Valladolid: Miñon; 1985.
35. Vinueza M, Coll J. Tratado de atletismo Madrid: Esteban Sanz; 1984.
36. Marchetti M. Biomecánica de la marcha deportiva. Athleticastudi. 1982;4:19-42.
37. Murray M, Drought A, Kory R. Walking patterns of normal men. J Bone Joint Surg Am. 1964;46(2):335-60.
38. Sutherland D, Olshen R, Cooper L, Woo S. The development of mature gait. J Bone Joint Surg Am. 1980;62(3):336-53.
39. Carrera J. La estabilidad de la parte posterior del pie. Revista Española de Medicina de la Educación Física y el Deporte. 1995;5:45-9.
Recibido: 5 de octubre de 2016.
Aprobado: 20 de octubre de 2016.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}