










 Servicios personalizados
Servicios personalizados Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkINTRODUCCIÓN
En Cuba la carrera Ingeniería en Automática posee la misión de formar especialistas en la rama de la automatización. Para respaldar el objeto de la profesión se encuentra la disciplina Sistemas de Control. En el plan de estudio la disciplina está compuesta por un grupo de asignaturas que conforman el currículo base como son: Modelado y simulación, Maquinaria Eléctrica, Ingeniería de Control I, Ingeniería de Control II, Procesos, Control de Procesos I y Accionamiento Eléctrico.
Para aplicar los contenidos de la asignatura Ingeniería de Control II, se realizan prácticas de laboratorios como tipología de clases. En esta modalidad, los estudiantes expresan los conocimientos adquiridos en laboratorios equipados, en correspondencia con el perfil que se requiera (Saenz et al., 2015; Samuelsen and Graven, 2016). En este contexto el usuario puede realizar las prácticas en laboratorios físicos, con equipos afines a la materia recibida o realizar prácticas a distancia. Para ello acceden a equipamientos físicos centralizados de manera remota con el empleo de laboratorios remoto.
Los laboratorios remoto o a distancia son laboratorios convencionales con equipos generalmente sofisticados o exclusivos que por medio de interfaces Web permiten la manipulación del equipo de forma remota (Garbi Zutin et al., 2017), (Hernandez-Jayo et al., 2018), (Contreras-Mendieta et al., 2019). Este tipo de acceso facilita compartir los recursos entre varias instituciones, de esta forma la inversión para equipamiento puede compartirse entre varias instituciones y el número de usuarios especializados se incrementa, aumentando así los beneficios académicos (Cáceres and Amaya, 2016; Jin-Hsien and Jongyun, 2007; Santana et al., 2013). Los laboratorios remostos representan un lugar o entorno cuya función es realizar un control sobre un sistema físico a distancia, con el objetivo de tele operar un sistema real, realizar experimentos y acceder a los datos a través de la red para obtener medidas (Buitrago-Molina et al., 2014; Milner and Holladay, 2018).
Dentro de las características que distinguen a los laboratorios remoto se encuentra la disminución de gastos por conceptos de mantenimiento y equipamiento (Zabaljauregui et al., 2018), (Mar-Cornelio et al., 2019). Se considera que esta característica los hace atractivos para ser utilizados por instituciones y centros de investigaciones que realizan cursos a distancia. A partir del estudio de la literatura especializada sobre los Laboratorios Remoto a escala internacional, diversos autores afirman que representan una alternativa efectiva para la enseñanza en ingeniería (Rodríguez et al., 2019), (Ortiz et al., 2020). Sin embargo, otros autores identifican que los Laboratorios Remoto poseen una barrera en el desarrollo de las habilidades prácticas de los estudiantes ya que estos no manipulan los elementos de interconexión de los dispositivos (Jo and Jo, 2020), (Amaudov and Dudin, 2020). Las principales plataformas de laboratorios remotos constituyen software propietario lo que imposibilita una soberanía e independencia tecnológica, restringe su adquisición y uso por instituciones docentes presupuestadas.
La presente investigación tiene como objetivo desarrollar un Sistema de Laboratorios Remoto para la práctica de control de la carrera Ingeniería en Automática. El sistema propuesto integra un conjunto de procesos que garantizan las experimentaciones para lo cual se diseña una maqueta de un proceso térmico a escala.
METODOLOGÍA COMPUTACIONAL
La presente sección describe los componentes fundamentales de la propuesta de Sistema de Laboratorios Remoto. La propuesta cuenta tres actividades fundamentales: diseño de controladores, identificación de sistemas y ejecución de prácticas en sistemas físicos. El ambiente de trabajo generado incorpora un escenario donde los estudiantes pueden enfrentarse al desarrollo de las prácticas donde se recree un ambiente homólogo a la realidad. El diseño del Sistema de Laboratorios Remoto se ha modelado mediante cuatro actores fundamentales que agrupan los principales Casos de Uso del Sistema. La Figura 1 muestra el Diagrama de Caso de Uso del sistema propuesto.
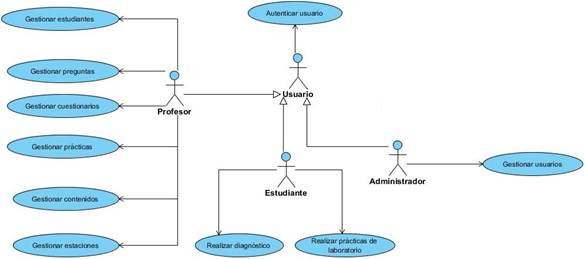
Descripción de los actores de Caso de Uso.
El actor Usuario: es una representación de un actor genérico que posee el rol de autenticarse en el sistema. De este actor se heredan sus permisos para el resto de los actores del sistema.
El actor Administrador: hereda las funcionalidades del actor Usuario y posee los permisos para la gestión de usuarios (insertar usuarios, modificar usuarios y eliminar usuarios).
El actor Profesor: hereda las funcionalidades del actor Usuario además posee los permisos para la gestión de las estaciones de trabajo para realizar las prácticas de laboratorios, gestiona las prácticas de laboratorios que realizarán los estudiantes, gestiona estudiantes en el sistema. Además, tiene otras funcionalidades asignadas como la gestión de preguntas evaluativas, cuestionarios evaluativos y contenidos de estudio.
El actor Estudiante: hereda las funcionalidades del actor Usuario además puede realizar diagnósticos de sus habilidades y realizar prácticas de laboratorios.
En la literatura pueden encontrarse diversas han sido las arquitecturas de los Sistemas de Laboratorios Remoto para la enseñanza del Control (Aguilar Juárez and Heredia Alonso, 2013; Buitrago-Molina et al.,2014; Mar et al., 2016; Rubio et al., 2016; Sartorius C. et al., 2005). En las mismas se pudo constatar que cada sistema posee una arquitectura y flujo de trabajo definido en dependencia del fenómeno que se modela. La Figura 2 muestra la arquitectura definida para el Sistema de Laboratorio Remoto propuesto en la presente investigación.
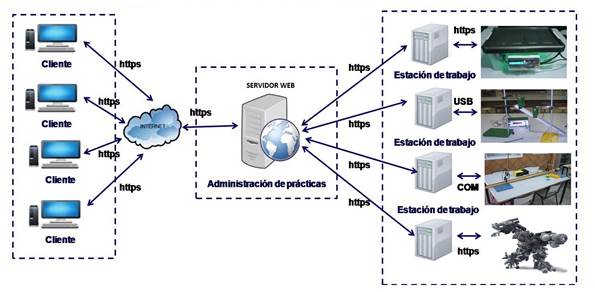
La arquitectura propuesta posee tres componentes fundamentales: clientes, administración de práctica y estación de trabajo. Los clientes representan los usuarios finales que realizan las experimentaciones disponibles en el Sistema de Laboratorios Remoto. La administración de prácticas agrupa toda la gestión que realizan los servidores de aplicaciones para el sistema de laboratorios propuesto. En el servidor de aplicaciones se gestionan las estaciones de trabajo y las prácticas de laboratorios. Por su parte las estaciones de trabajo representan los procesos reales sobre los cuales los estudiantes realizan las experimentaciones propuestas.
La Figura 3 muestra el flujo de las tres actividades fundamentales propuestas para el Sistema de Laboratorios Remotos (diseño de controladores, identificación de sistemas y ejecución de prácticas en sistemas físicos).
Para el desarrollo de esta investigación se utilizaron un conjunto de tecnologías y herramientas que garantizaron el proceso de construcción de la solución. Se planteó como principio que las tecnologías y herramientas fueran de software libre en tu totalidad con el objetivo de garantizar la soberanía e independencia tecnológica. Se utilizó PostgreSQL en su versión 9.6 como sistema de gestión de bases de datos, Hibernate como entorno de trabajo, Python en su versión 3.0 como lenguaje de programación.
Para la implementación de las prácticas remotas se diseñó una maqueta que gestiona el control del proceso mediante una tarjeta microcontroladora Arduino (Badamasi, 2014), (Blum, 2019), (Malhotra et al., 2020) como plataforma de desarrollo open hardware (Matijevic and Cvjetkovic, 2016; Murthy et al., 2014),(Contreras-Mendieta et al., 2019), la Figura 4 muestra la maqueta diseñada.

La maqueta representa un proceso térmico a escala. Está diseñada para que los estudiantes realicen experimentaciones sobre la misma donde pueden identificar el sistema, ajustar el controlador y probar el controlador en el sistema físico.
La maqueta está compuesta por una armadura de polietileno, utiliza un sensor de temperatura LM35, una tarjeta microcontroladora Arduino uno con una interface Ethernet para garantizar la comunicación con el Sistema de Laboratorios Remoto. Incorpora además un resistor en su interior encargado de disipar energía térmica la cual es re-circulada mediante un sistema de ventilación interno.
A partir de la concepción general de la maqueta se programó sobre la tarjeta microcontroladora Arduino un controlador PID que recibe sus parámetros de ajuste desde el Sistema de Laboratorios Remoto. El estudiante puede analizar el comportamiento de la variable temperatura, respuesta del controlador en el proceso diseñado, lo tiempos de establecimiento entre otras variables de interés.
RESULTADOS Y DISCUSIÓN
El desarrollo de las prácticas de laboratorios genera un conjunto de eventos que son gestionados y almacenados en la base de datos del sistema. A partir del almacenamiento de las operaciones realizadas, se generan reportes sobre las acciones realizadas por los estudiantes y se controla el historial de operaciones.
Los clientes Web son los usuarios finales de la herramienta. En la herramienta propuesta los estudiantes realizan las prácticas de Laboratorios de Control. Acceden al servidor de aplicaciones mediante una conexión a la red universitaria o Internet.
El servidor de aplicaciones Web es el encargado de la comunicación entre los clientes Web y las estaciones de trabajo; desde este se realiza la administración de las prácticas y es gestionado el flujo de trabajo propuesto. El servidor de aplicaciones Web permite el intercambio de información mediante servicios Web con las estaciones de trabajo. Las estaciones de trabajo se conectan físicamente con las plantas que funcionan como maqueta en el sistema.
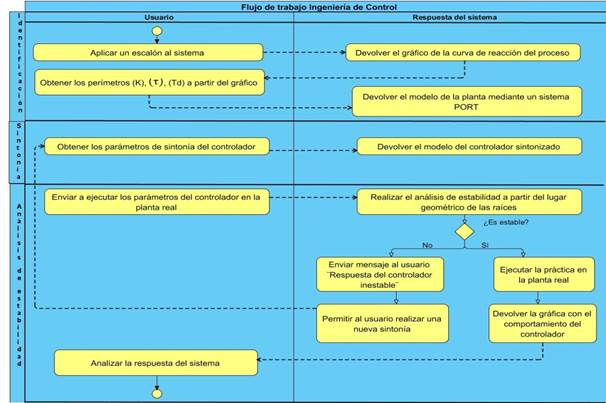
El sistema soporta la gestión sobre las prácticas de laboratorios de Control mediante un flujo de trabajo. El flujo representa una solución efectiva a partir de una secuencia de actividades para las actividades propuestas. La Figura 5 representa el flujo de trabajo que se propone.
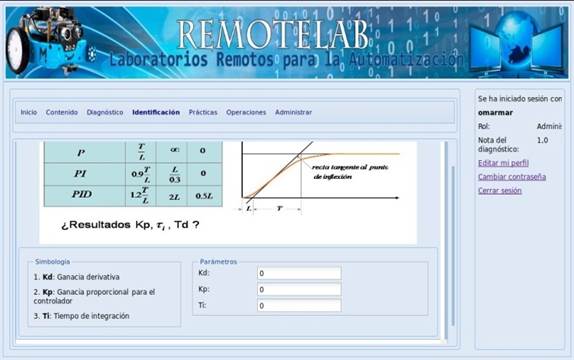
La Figura 6 muestra la interface del sistema para realizar la actividad de identificación de sistemas. La actividad identificación del sistema permite realizar prácticas de identificación del sistema a controlar. El estudiante realiza una aproximación mediante un Sistema de Primer Orden con Retardo de Transporte (PORT).

Para el proceso de identificación del sistema el estudiante debe seleccionar un escalón que será aplicado a la planta para obtener la curva de reacción. A partir de la curva de reacción el estudiante debe ser capaz de obtener los valores (k),  , (Td). En la actividad el estudiante obtuvo como resultado la aproximación del modelo de la planta identificada mediante PORT en el dominio continuo.
, (Td). En la actividad el estudiante obtuvo como resultado la aproximación del modelo de la planta identificada mediante PORT en el dominio continuo.
Una vez identificado el sistema se realiza la sintonía del controlador y se obtiene el modelo de la planta y el controlador antes de ejecutarse en los sistemas físicos. La Figura 7 muestra la interfaz de entrada de datos para el controlador diseñado. Los estudiantes a partir de la aplicación de un método de diseño, deben obtener los parámetros de sintonía del controlador a utilizar en la práctica real. Los parámetros de entradas representan un dominio de valores reales obtenidos de forma empírica, de introducir parámetros incorrectos en el paso posterior donde se realiza el análisis de estabilidad se constatará el error.
Para la sintonía del controlador es importante conocer las reglas del diseño, por ejemplo:
Si se desea un error en estado estable igual a cero, regla que introduce el componente integrador.
Si el tiempo de establecimiento debe ser el menor posible, regla que introduce el componente derivativo.
A partir de las reglas del diseño se decide si el controlador es P, PI o PID para que el tipo del sistema sea uno. Por Ziegler-Nichols los parámetros del controlador se calculan tal como expresa la Tabla 1(Ziegler and Nichols, 1942).
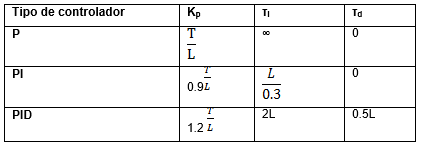
Para obtener L y T, se traza una recta tangente al punto de inflexión de la respuesta, la intersección con el eje del tiempo y con el valor final de la amplitud forman las distancias L y T.
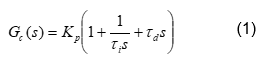
Con L y T, se obtienen los parámetros del controlador PID obteniendo el modelo del controlador tal como muestra la ecuación 1 en el dominio continuo.
El análisis de estabilidad permite identificar el mal funcionamiento en las estaciones disponibles para el Sistema de Laboratorios Remoto(Arántegui, 2011), (Ramiro and Cuzange 2019), (Ramírez et al., 2020).
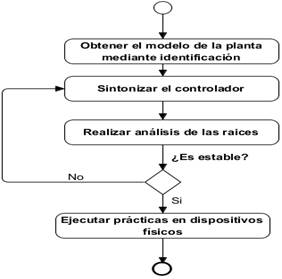
Los autores implementaron un algoritmo para realizar el análisis de estabilidad a partir del análisis del lugar geométrico de las raíces utilizando funciones de Matlab. La Figura 8 describe el algoritmo propuesto.
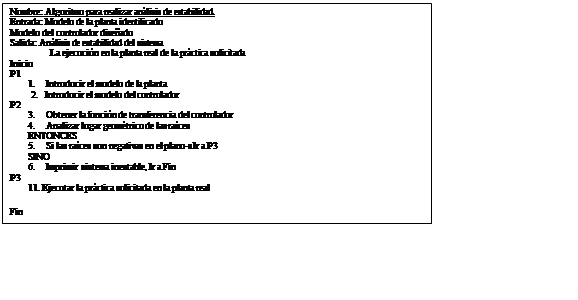
Flujo de actividades para realizar el análisis de estabilidad:
Obtener el modelo de la planta: a partir del proceso de identificación de la planta se obtuvo un modelo aproximado del proceso en la actividad anterior y es tomado como dato de entrada para el análisis de estabilidad del sistema.
Obtener el modelo del controlador: a partir del proceso de sintonía del controlador se obtuvo el modelo del controlador que representa una entrada para el análisis de estabilidad del sistema.
Análisis de las raíces: un sistema es estable si responde con una variación finita a variaciones finitas de sus señales de entrada. Si se considera un sistema lineal e invariante en el tiempo, la inestabilidad del sistema supondrá una respuesta que aumenta o disminuye de forma exponencial, o una oscilación cuya amplitud aumenta exponencialmente (OGATA 2010). Para el análisis de estabilidad se aplicó el lugar geométrico de las raíces (LGR) y se utilizó una instancia de MATLAB para obtener el resultado.
Ejecutar práctica: a partir de la determinación de que el controlador sintonizado por el estudiante es estable según el LGR, se envía la información a la planta real para ser realizada la práctica de laboratorios en el dispositivo físico.
A partir de la obtención de los parámetros del controlador, se procedió a ejecutar las prácticas reales. La ejecución de las prácticas reales permite, a partir de la sintonía de los parámetros del controlador, ejecutar la práctica en el dispositivo físico. Para ello se determina la estabilidad del controlador propuesto previamente. La Figura 9 muestra la interface utilizada para la ejecución de las prácticas reales.

La interfaz muestra una vista para introducir los parámetros sintonizados del controlador. El sistema devuelve la respuesta del comportamiento de la acción de control sobre el proceso. Una vez introducidos los parámetros del controlador, se realiza el análisis de estabilidad.
CONCLUSIONES
El estudio de la literatura científica especializada arrojó que las principales plataformas de laboratorios remotos constituyen software propietario lo que imposibilita una soberanía e independencia tecnológica, restringe su adquisición y uso por instituciones docentes presupuestadas lo que fundamenta el desarrollo del Sistema de Laboratorios Remoto propuesto.
El Sistema propuesto establece como resultado tres actividades fundamentales: identificación de sistema, diseño de controladores y ejecución de prácticas en procesos reales, facilitó el trabajo a distancia de los estudiantes de Ingeniería en Automática mediante tecnología y herramientas de software libre.
A partir de las experimentaciones realizadas en el Sistema de Laboratorios Remoto fue posible que los estudiantes analicen el comportamiento de la variable temperatura, respuesta del controlador en el proceso diseñado, los tiempos de establecimiento, entre otras variables de interés lo que le facilitará obtener una visión general de los contenidos recibidos en la asignatura.
Aunque los resultados que se presentan logran realizar el flujo de trabajo para un proceso específico, el Sistema de Laboratorios Remoto propuesto implementa una arquitectura que permite incorporar nuevos procesos para realizar experimentaciones. Sobre esta base, investigaciones futuras se recomienda la creación de nuevos procesos que nutran el funcionamiento del sistema propuesto.

