










My SciELO
 Custom services
Custom servicesServices on Demand
Article
 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO
Related links
-
 Similars in
SciELO
Similars in
SciELO
Share

 Permalink
PermalinkIngeniería Electrónica, Automática y Comunicaciones
On-line version ISSN 1815-5928
EAC vol.33 no.3 La Habana Sept.-Dec. 2012
ARTICULO ORIGINAL
Comparación de Algoritmos de Segmentación de Ruido Aplicados a Imágenes de Resonancia Magnética
Comparison of Segmentation Algorithms Applied to Noise Magnetic Resonance Imaging
MSc. Eduardo Barbará Morales1, Ing. Reinier Sánchez Bao1, Dr. Evelio R. González Dalmau2.
1. Departamento de Bioingeniería, Facultad de Ingeniería Eléctrica, Instituto Superior politécnico José A. Echeverría, La Habana, Cuba. Email: eduardobm@electrica.cujae.edu.cu , reinier_sb@electrica.cujae.edu.cu .
2. Centro de Ingeniería Genética y Biotecnología, La Habana, Cuba. Email: evelio.gonzalez@infomed.sld.cu .
RESUMEN
En el estudio y diagnóstico de pacientes pediátricos que presentan tumores en el sistema nervioso central (SNC), se emplean imágenes de Resonancia Magnética (RM) para cuantificar, evaluar y documentar las terapias y tratamientos aplicados. Estas imágenes se ven afectadas por ruidos, principalmente producto del movimiento del paciente en el período de estudio y en el proceso de adquisición de la imagen. En este trabajo se proponen dos algoritmos sencillos y eficientes para realizar la segmentación del ruido presente en las imágenes, analizando su histograma característico. Estas técnicas de segmentación de ruido permiten obtener imágenes a las cuales se les ha segmentado y puesto a cero una cierta cantidad de pixeles, con lo cual es posible disminuir el tiempo de cómputo en procesamientos posteriores. Se realizan además comparaciones entre los algoritmos donde se mide el tiempo de cómputo, el error medio relativo, la cantidad de puntos que son puestos a cero entre otras variables de interés.
Palabras claves: algoritmos, segmentación de ruido, imágenes de RM
ABSTRACT
In the study and diagnosis of pediatric patients with tumors in the central nervous system (CNS) magnetic resonance imaging (MRI) is used to quantify, evaluate and document therapies and treatments. These images are affected by noise, mainly from the movement of the patient in the study period and in the process of image acquisition. In this paper we propose two simple and efficient algorithms for noise segmentation in images, analyzing its histogram feature. These noise segmentation techniques produce images which have been segmented and reset a number of pixels, making it possible to reduce the computation time in subsequent processing. Also, comparisons between the algorithms are made by measuring the computation time, the mean relative error, the number of points that are set to zero and other variables of interest.
Key words: magnetic resonance imaging, noise segmentation.
INTRODUCCIÓN
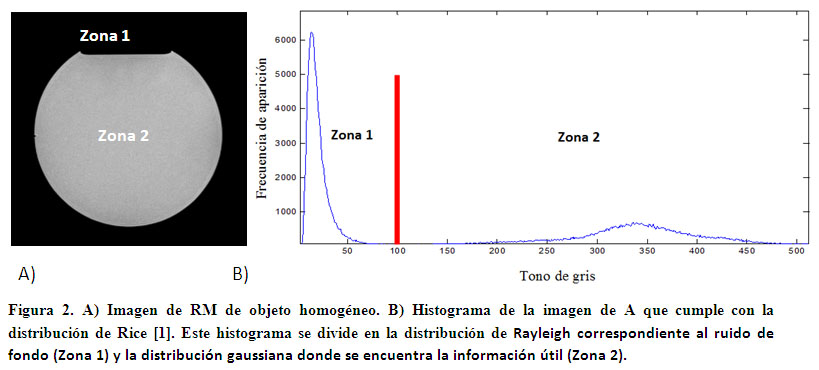
Las imágenes de resonancia magnética (RM) adquiridas para diferentes estudios se encuentran afectadas por el ruido. Las principales fuentes de ruido suelen ser el movimiento del paciente cuando se realiza el estudio y el proceso de adquisición de las imágenes. El histograma correspondiente a una imagen de RM cumple con la distribución de Rice, que está formada por la distribución de Rayleigh correspondiente al ruido de fondo y una distribución gaussiana que corresponde con la información útil representada en la imagen [1]. En los histogramas de este tipo de imágenes siempre se observa el mayor pico en los niveles bajos de intensidad, indicando consecuentemente la existencia de un gran número de píxeles correspondientes al ruido.
La segmentación del ruido se aplica con el fin de minimizar el efecto de estos píxeles en el procesamiento de la información útil. Es usual establecer en cero la intensidad de todos estos píxeles que no ofrecen información. Este procedimiento se realiza para reducir el tiempo de cómputo, ya que los pixeles considerados como ruido y puestos a cero no serán procesados posteriormente.
Separar o segmentar el ruido de fondo de la imagen de RM es un problema actual alto consumidor de tiempo de cómputo. En ocasiones se proponen algoritmos matemáticos complejos que dificultan el proceso [2-5]. Uno de los métodos más ampliamente difundidos emplea la primera derivada del histograma y considera el primer cambio de signo como el umbral de ruido [3,5]. Esta forma es relativamente costosa en tiempo, lo cual se evidencia en el presente trabajo, ya que puede requerir de filtrados y búsquedas secuenciales del punto de inflexión.
En este trabajo se propone un método sencillo y poco costoso computacionalmente para segmentar el ruido usando el 5% de máximo del histograma de la IRM. Además se compara con otras variantes efectivas para el cálculo del umbral de ruido. Se realizan comparaciones de la eficiencia de estos métodos con el de la derivada, teniendo en cuenta mediciones de tiempo de cómputo, cantidad de pixeles segmentados y error relativo en cada proceso. Con estas medidas se determina el método más efectivo.
MATERIALES Y MÉTODOS
Pacientes y secuencias de pulsos utilizados
Las imágenes de RM de este trabajo fueron obtenidas a pacientes pediátricos con diagnóstico confirmado de tumores del sistema nervioso central. Se utilizó un equipo de 1.5 T Symphony Maestro Class MR System (Siemens, Alemania). El protocolo incluye imágenes sopesadas en T2w, T1w, FLAIR y difusión. Se emplearon orientaciones de cortes axial, sagital y coronal con 3 mm de espesor. Los pacientes examinados han tenido seguimiento a determinado tratamiento por más de un año.
Ruido en las imágenes de Resonancia Magnética
Considerando la electrónica del equipo de RM como lineal e invariable temporalmente, entonces la tensión a la salida de los canales del detector está compuesta por la señal deseada V(t) y por ruido N(t) que, por lo general, se considera aditivo [1,6]. Este ruido es provocado por la resistencia de la bobina (Rb) y los elementos capacitivos e inductivos sólo cambian su fase [6] o alteran su espectro. A este ruido, térmico o de Johnson se le agrega el aporte de la muestra (Rm), y de la temperatura Tc ambiente. La expresión teórica más aceptada para expresar el ruido en una imagen de RM [6] involucra a la constante de Boltzmann k: (ecuación 1)
En (1) se unen a los parámetros de la imagen como Dx, Dy (dimensiones de los píxeles en el plano), factores instrumentales como el tiempo de muestreo de la señal (TADQ), inverso del ancho de banda del receptor y el PR(x) que caracteriza el resto de la electrónica del sistema y depende de la coordenada sólo en la dirección de codificación de frecuencia [6]. Es decir, el ruido es inversamente proporcional al tamaño del pixel (Dx, Dy) y TADQ [6], siendo estos parámetros a tener en cuenta al diseñar o calibrar cualquier serie de impulsos.
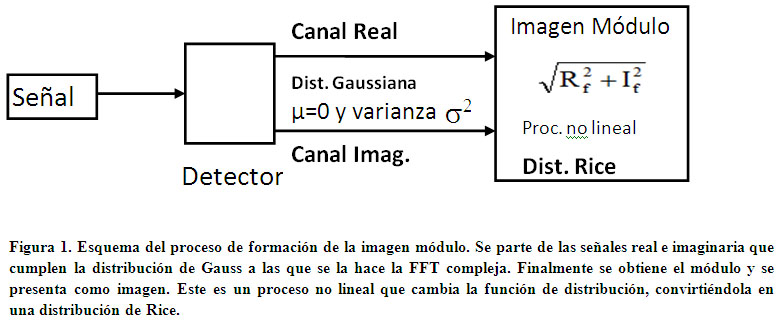
El ruido a la salida de cada canal del receptor se considera independiente e idénticamente distribuido con varianza s² [6]. Pero cuando se hace la Transformada Rápida de Fourier (FFT) y se obtiene la imagen módulo se introduce una transformación no lineal (ver Figura 1) y la intensidad de los píxeles cumple entonces la llamada distribución de Rice, Pm(I') [1,6] de la siguiente forma: (ecuación 2)
Donde I' es la intensidad del píxel medido, s2 es la varianza de la señal de la distribución gaussiana (Figura 1), I es la intensidad del píxel en ausencia de ruido y Be0 es la función de Bessel modificada de orden cero.
Por tanto las imágenes de RM presentan un histograma como el mostrado en la figura 2. En estos se identifican dos zonas, la primera de ellas es una distribución de Rayleigh y corresponde al ruido de fondo y la segunda es una gaussiana que se asocia a los pixeles con la información útil. Por esta razón se puede segmentar el ruido de la imagen sin alterar la información útil contenida en ella.
El reto es encontrar de forma automática dónde termina el ruido, que es no correlacionado e independiente de la posición, y dónde comienza la señal útil. Las distribuciones presentes en el histograma sugieren varias formas de resolver este problema.
Segmentación de ruido
Para separar el ruido de Rayleigh se utilizaron tres algoritmos. Estos se diferencian por la forma de fijar los umbrales hasta donde se considera ruido. Los valores de los pixeles menores que el umbral serán puestos a ceros, para reducir el tiempo de cómputo en procesamientos posteriores a realizar con las imágenes. Seguidamente se describen los algoritmos utilizados.
«Algoritmo de la derivada»
Este algoritmo desarrollado será considerado el patrón de comparación contra el cual se evaluaran los demás métodos implementados. Este método aplica un filtro de media deslizante con una ventana de 151 coeficientes al histograma de la imagen original. Experimentalmente se encontró que este valor de la ventana es el más adecuado, pues es el mínimo de coeficientes en el cuál la derivada encuentra un umbral correcto. El proceso se realiza para suavizar las transiciones bruscas que puede presentar el histograma. Luego se calcula la primera derivada al histograma filtrado con media deslizante, y nuevamente se procesa con el filtro descrito anteriormente, al resultado obtenido se le calcula el valor máximo. Este valor encontrado se utiliza como punto de partida para calcular el valor mínimo empleando la derivada.
Para segmentar el ruido se encuentra el primer mínimo después de realizar el procesamiento anterior. Para ello se debe buscar el punto donde la derivada del histograma cambia de signo. El valor así calculado será considerado el umbral
hasta donde se considerarán los pixeles como ruido. En la figura 3 se muestra un diagrama en bloques que ilustra la secuencia de pasos descrita anteriormente.
Umbralización con el «cinco por ciento»
Este consiste en identificar el valor máximo del histograma, correspondiente siempre a la distribución de Rayleigh [6], luego se obtiene el cinco por ciento de este valor y se asocia con su nivel de intensidad correspondiente, este criterio de selección constituye el umbral para la segmentación [1]. La selección del umbral como el «cinco por ciento» del máximo del histograma es empírica y se cumple siempre que la relación señal ruido esté por encima de 15 unidades relativas [1,6]. De esta forma todos los pixeles que clasifiquen por debajo del umbral serán segmentados y puestos a ceros. Los pixeles segmentados como ruido no serán considerados en procesamientos posteriores que se realicen a la imagen, con lo cual se obtiene una disminución del tiempo de cómputo. En la figura 4 se muestra un diagrama en bloques donde se representa la secuencia del algoritmo descrito.
· Algoritmo del «porciento más la derivada»
Este algoritmo consiste en la combinación de dos de los métodos propuestos anteriormente, el «método del porciento» y el de «la derivada». Inicialmente se debe identificar el nivel de intensidad inferior a un cinco por ciento del valor máximo del pico correspondiente a la distribución de Rayleigh. Este criterio busca recortar el histograma hasta un punto cercano al primer mínimo de la distribución gaussiana [1]. Luego se aplica un filtrado con media deslizante centrada con tamaño de ventana de 51 coeficientes. De forma experimental se encontró que este valor de ventana tiene la cantidad mínima de coeficientes para el cual la derivada encuentra un umbral correcto. Con este proceso se suavizan los cambios bruscos que aparecen en el histograma. A continuación se calcula la primera derivada y nuevamente el resultado es procesado con el filtro de media deslizante.
En esta configuración que se propone las etapas de filtrado se aplican de forma secuencial, por lo que constituyen una combinación en cascada. No obstante, los filtros de media deslizante empleados para suavizado realizan un tratamiento en los extremos de la secuencia que permite una salida de igual cantidad de muestras que la entrada y ayuda a conservar la forma de la onda; pero constituye una operación no lineal, aunque invariante en el tiempo [7].
Buscando reducir el tiempo de cómputo del algoritmo se combinaron las tres etapas de filtrado en una sola. Se encontró la función de sistema equivalente considerando las tres etapas como lineales e invariantes en el tiempo. Esta aproximación produce un sistema de simetría impar y cantidad par de coeficientes, siendo de tipo IV [8]. Para obtener una respuesta de sistema con mejor comportamiento pasa banda, correspondiente con el proceso de suavizado y derivación, se inserta un coeficiente con valor cero en el centro convirtiendo el sistema en tipo III [8]. La figura 5 muestra el sistema resultante equivalente que se propone, donde se combinan los bloques de filtrado de media deslizante y primera derivada en una sola función de sistema.
Luego de aplicar estas operaciones, se obtendrá una imagen donde han sido segmentados y puestos a cero los pixeles que corresponden al ruido de fondo.
Para realizar el análisis comparativo de los tres algoritmos propuestos se seleccionaron siete imágenes de RM que fueron adquiridas con las características descritas anteriormente. El análisis realizado es cuantitativo y se basa en comparar los tiempos de cómputo y por ciento de puntos puestos a cero (segmentados) de los diferentes algoritmos. El análisis del nivel de afectación de las secciones correspondientes a información útil se realiza por medio del cálculo del error relativo entre medias de intensidad para regiones de interés (ROI) ubicadas en la parte útil de la imagen. Además, se emplea este mismo indicador en el análisis del nivel de efectividad de los algoritmos seleccionando una ROI correspondiente a información no útil (ruido). El cálculo del error se realizó mediante la expresión (3):

Dónde:
Erelativo: Error relativo
IImg Original: Intensidad media, medida en una ROI de la imagen original.
I Img Proc : Intensidad media, medida en una ROI de la imagen procesa con los algoritmos propuestos.
DISCUSIÓN DE RESULTADOS
En la figura 6 se muestra una imagen de RM, a la cual le fueron aplicados los tres algoritmos propuestos. Se muestran además el histograma de la imagen original y los segmentados, con diferentes umbrales encontrados. En las restantes imágenes mostradas se puede observar el ruido que fue segmentado para cada uno de los métodos implementados.
En la tabla 1 se muestra los valores de intensidad media y error relativo contra la imagen original de cada algoritmo implementado sobre una ROI correspondiente a información útil. Puede observarse que en todos los algoritmos el error relativo de intensidad media es pequeño, inferior al 4%, lo cual indica que el nivel de afectación no es significativo en las zonas correspondientes a tejidos. Además, se evidencia que el «algoritmo del por ciento» produce la menor afectación, mientras que el «algoritmo del por ciento más derivada» presentan los mayores niveles de afectación.
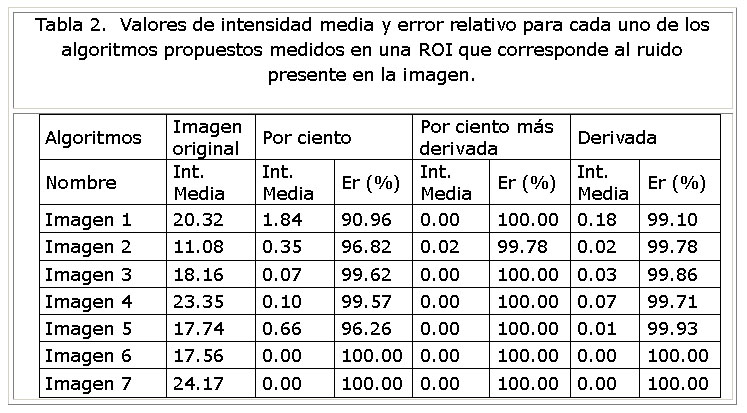
La tabla 2 muestra los indicadores para una ROI correspondiente a la Zona 1, donde se esperan los mayores valores de Er. Esto ocurre porque las intensidades de los pixeles identificados como correspondientes al fondo (Zona 1) son igualados a cero y se comparan con la los de la imagen original que son ruido según la distribución de Rice [1]. Todos los errores relativos dieron superiores al 90 %, lo cual evidencia la efectividad de los métodos para la segmentación del ruido. Según esto, el algoritmo de mayor efectividad es el del «por ciento más derivada» (99.78-100 %), luego le sigue el «método de la derivada» (99.1-100%). Por último, el «algoritmo del por ciento» es el menos efectivo (90.96-100%), pues cambió menos pixeles a cero, aunque es el más rápido computacionalmente. En [9] se plantea que valores de más del 20% para materia gris, blanca y el líquido cefalorraquídeo son aceptables, mientras que para el ruido, y por medio el error relativo debe exceder el 80%. Resultados previos [9] avalan los obtenidos por los métodos implementados en este trabajo.
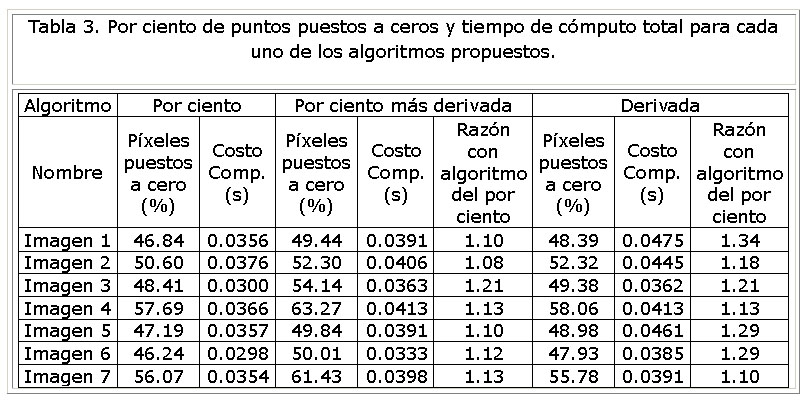
La tabla 3 muestra el por ciento de puntos puestos a cero (segmentados) y los tiempos de cómputo como resultado de aplicar los diferentes algoritmos a cada una de las imágenes de prueba (en toda su extensión). El tiempo de cómputo corresponde con el intervalo de ejecución específico de cada algoritmo, obviando aquellos procedimientos comunes. Puede observarse que en todos los casos el «algoritmo del por ciento» necesita el menor tiempo para su ejecución, lo cual se fundamenta por el hecho de ser el de mayor simplicidad computacional. Por este motivo se adiciona en el análisis del resto de los métodos el campo de razón con «algoritmo del por ciento», ofreciendo una medida cuantitativa directa del consumo computacional extra que presentan, tomando el algoritmo más simple como referencia.
Puede observarse que generalmente el «algoritmo de la derivada» presenta un costo computacional mayor que el resto, lo cual se fundamenta por el alto orden del filtro empleado en el suavizado del histograma y luego de su derivada. No obstante, el por ciento de píxeles que logra segmentar es muy similar al logrado con el algoritmo del por ciento. Una reducción de su costo computacional se logra empleando un filtro de orden menor; pero esto a su vez conduce a la localización de un mínimo en valores inferiores de intensidad, lo cual reduce su nivel de efectividad.
Por último, el «algoritmo del por ciento más derivada» alcanza generalmente un mayor por ciento de píxeles segmentados. Esto se debe a que se parte del umbral localizado con el método del por ciento, mucho más cercano al límite entre distribuciones, por lo que se necesita de un orden menor del filtro empleado en el suavizado del histograma.
Se realizaron además mediciones de los parámetros mostrados en la tabla 3, para una serie de 40 imágenes sopesadas en T1W, tomadas a un paciente. Los resultados para la serie muestran que el tiempo de cómputo total aplicando el «algoritmo de la derivada» es de 61.04 segundos, el «por ciento más derivada» 54.53 segundos, y el «método del porciento» emplea un tiempo de 49.37 segundos, siendo este 1.23 veces más rápido en comparación con el «algoritmo de la derivada».
Aumentar el por ciento de pixeles segmentados, implica aumentar el tiempo de cómputo y la complejidad de los algoritmos, por lo que se establece una relación de compromiso entre estos aspectos. El «algoritmo del por ciento más derivada» resultó ser el de mayor por ciento de pixeles segmentados. Este método utiliza un filtro de menor orden para el suavizado del histograma, lo que lo hace más eficiente computacionalmente que el «algoritmo de la derivada».
CONCLUSIONES
En este trabajo fueron presentados tres algoritmos implementados para la segmentación de ruido en imágenes de RM. En los resultados obtenidos se evidencia que todos ellos segmentan el ruido correspondiente a la distribución de Rayleigh, sin afectaciones significativas en la zona donde se encuentra la información de tejido útil. En todos los casos probados el «algoritmo del por ciento» es el de menor tiempo de cómputo, y el más simple de implementar. El análisis general de los indicadores de efectividad mostró que la mejor forma de segmentar el ruido es usando como umbral el 5% del ruido. Con este método cambia menos la imagen en la zona 1, se tiene menor costo computacional y los cambios en la zona 1 conducen a valores de mas del 90%. No obstante si se requiere hacer una segmentación más precisa pudiera emplearse la combinación del 5% y la derivada.
Agradecimeintos
Los autores del trabajo agradecen: al Centro de Investigaciones Médico Quirúrgicas por permitir el uso de equipo de RM, al Centro de Ingeniería Genética y Biotecnología por el soporte material y al Dpto. de Ingeniería Biomédica del ISPJAE.
REFERENCIAS
[1] GONZÁLEZ E, NODA M, et al. «Cuantificación de descriptores de la calidad de Tomógrafos por Resonancia Magnética a bajos campos». Universidad Ciencia y Tecnología. 2001, vol 5, p.65-72.
[2] BEEVI S, SATHIK M. «An Effective Approach for Segmentation of MRI Images: Combining Spatial Information with Fuzzy C-Means Clustering». European Journal of Scientific Research. 2010,vol 41, p. 437-451.
[3] RAJAN J, POOT D.et al. «Segmentation Based Noise Variance Estimation from Background MRI Data». En: ICIAR, (Berlin Heidelberg 2010),[S.l.]: [s.n.], 2010, p. 6270.
[4] AJA F, ALBEROLA et al. «Noise and Signal Estimation in Magnitude MRI and Rician Distributed Images: A LMMSE Approach». IEEE Trans Image Process. 2008, vol 17, p. 1383-1398.
[5] RAJAN J, POOT D, et al. «Noise measurement from magnitude MRI using local estimates of variance and skewness». Phys. Med. Biol. 2010, vol 55, p.N441N449.
[6] GONZÁLEZ E. Descriptores cuantitativos de calidad para Tomógrafos por Resonancia Magnética.http://eduniv.mes.edu.cu/07-Tesis/Universidad-Oriente/Centro-Biofisica-Medica/Doctorados/1139698D-2003-Evelio.zip. (2006).
[7] GONZÁLEZ R, WOODS R, et al. Digital Image Processing using Matlab. Prentice-Hall, New Jersey, 2004. ISBN: 0-13-008519-7.
[8] PROAKIS J, MANOLAKIS D. Tratamiento Digital de Señales, 3nd ed. Prentice Hall. Madrid. 1998. ISBN: 84-8322-000-8.
[9] DINIZ P, MURTA-JUNIOR L, et al. «Brain tissue segmentation using q-entropy in multiple sclerosis magnetic resonance images». Braz J Med Biol Res. 2010, vol 43(1), p. 77-84.
Recibido: Julio 2012
Aprobado: Septiembre 2012

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}