










 Custom services
Custom services Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
Permalink1.- Introducción
Los algoritmos de control PID basados en eventos tratan de aprovechar las ventajas del control PID a la vez que reducen el tráfico por las redes de comunicaciones que conectan las distintas unidades de hardware que forman los sistemas de control distribuidos: sensores, controladores, actuadores. Las motivaciones para reducir el envío de datos son, por un lado, evitar la congestión de las redes y con ello la introducción de retardos en las comunicaciones y la pérdida de datos en sistemas altamente interconectados y, por otro lado, aumentar la vida útil de las baterías de los sensores remotos, ya que según algunos estudios la mayor parte de la energía se consume durante el envío de datos.
Dentro del control basado en eventos, las diferentes estrategias de muestreo cobran un protagonismo especial, ya que en muchos casos son estas propias estrategias las encargadas de generar los eventos para la ejecución del controlador o el envío de datos. Entre ellas las que más destacan son aquellas en las que la generación de eventos es debida al cruce de ciertos niveles o umbrales. Una de las estrategias de este tipo más estudiada en los últimos tiempos es la estrategia basada en enviar datos siempre y cuando la señal de error supere un valor δ, conocida por las siglas SOD (del inglés Send-On-Delta), cuya eficacia en reducir el tráfico de datos ha sido ampliamente probada (1; 2), y más concretamente una variante de esta caracterizada por incluir una histéresis con el mismo valor δ conocida como SSOD (del inglés Symmetric-Send-On-Delta), presentado en (3).
Con respecto a esta estrategia de muestreo, numerosos trabajos han sido presentados en la última década en los que se abordan diferentes aspectos. Varios casos de aplicaciones prácticas son presentados en (4; 5; 6) El muestreo SSOD puede inducir oscilaciones de ciclo límite, un comportamiento en general no deseado en los sistemas de control, por lo que en varios trabajos se han propuesto reglas de ajuste que aseguran la robustez ante dichas oscilaciones (7; 8; 9; 10; 11). La mayoría de estos trabajos se basan en el uso de la técnica de la función descriptiva (12), aunque también se han seguido otros enfoques, como el método de Tsypkin (13), que se ha usado en (8). En otros trabajos se ha estudiado el uso de las oscilaciones inducidas por el muestreo SSOD para la identificación de modelos de la planta a controlar (14; 15; 16; 17).
Otra posible estrategia de muestreo por cruce de niveles fijos es el cuantificador regular (RQ, del inglés Regular Quantifier), donde el envío de datos se produce cuando la señal de error es múltiplo de cierto valor, siendo así muy fácilmente implementables. En (18) se recoge un estudio comparando estas dos últimas estrategias de muestreo comentadas, donde los autores detallan algunas de las principales características de los sistemas controlados mediante estos métodos de muestreo tanto en términos de robustez como de desempeño del sistema.
Recientemente se propuso en (19) un nuevo método de generación de eventos llamado RQH (del inglés Regular Quantization with Hysteresis) que incluye como casos particulares el SSOD y el RQ. En este sentido, el RQH es una generalización que ofrece un compromiso entre las principales ventajas de cada uno los anteriores en cuanto a la robustez ante ciclos límites y la generación de eventos. En (20) se presentó un método de ajuste para controladores PI que usan el muestro RQH para cumplir especificaciones de robustez a los ciclos límites. La propuesta se basa en los métodos de respuesta en frecuencia, extendiendo algunos conceptos de la teoría clásica de control de sistemas continuos, como el margen de fase y de ganancia, al caso de los controladores basados en eventos.
En este trabajo se presenta una herramienta de software que permite el análisis, diseño y simulación de sistemas de control que incluyen reguladores PI y muestreo RQH. La herramienta está programada en Python, es de código abierto y puede ser usada tanto con fines de investigación como docentes. Antes de tratar los aspectos concretos de la herramienta, se abordan en el trabajo los principales problemas en la aplicación de este tipo de sistemas de control, así como los resultados teóricos más significativos que permiten una mejor compresión del software desarrollado.
2.- Planteamiento del problema
Considere el sistema de control en red mostrado en la Figura 1 donde  y
y  son las funciones de transferencia del controlador y del proceso respectivamente, el bloque EG representa el generador de eventos y el bloque ZOH un retenedor de orden cero. Además
son las funciones de transferencia del controlador y del proceso respectivamente, el bloque EG representa el generador de eventos y el bloque ZOH un retenedor de orden cero. Además  es la referencia,
es la referencia,  es la salida controlada y
es la salida controlada y  es una entrada de perturbación.
es una entrada de perturbación.
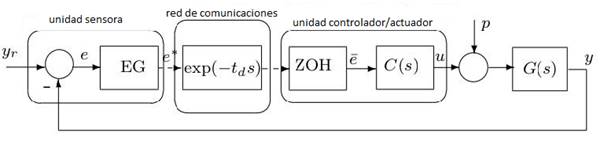
En el esquema presentado en la Figura 1 se asume que el controlador está localizado cerca del actuador y que el sensor envía medidas  del error
del error  al controlador a través de una red de comunicaciones. El envío se realiza mediante el bloque generador de eventos (EG). El bloque ZOH mantiene en
al controlador a través de una red de comunicaciones. El envío se realiza mediante el bloque generador de eventos (EG). El bloque ZOH mantiene en  el último valor de
el último valor de  hasta que un nuevo valor sea enviado. Este esquema de control fue propuesto en (3) considerando que es un controlador PI y que el generador de eventos se basa en un muestreo tipo SSOD, por ello, los autores la llamaron arquitectura SSOD-PI. En este trabajo, sin embargo, el muestro que se considera es el RQH, por lo que la arquitectura es llamada RQH-PI, la cual contempla el SSOD-PI como un caso particular.
hasta que un nuevo valor sea enviado. Este esquema de control fue propuesto en (3) considerando que es un controlador PI y que el generador de eventos se basa en un muestreo tipo SSOD, por ello, los autores la llamaron arquitectura SSOD-PI. En este trabajo, sin embargo, el muestro que se considera es el RQH, por lo que la arquitectura es llamada RQH-PI, la cual contempla el SSOD-PI como un caso particular.
Como se ha comentado anteriormente los dos principales métodos de muestreo usados para la generación de eventos por cruce de niveles son el muestreador SSOD, RQ y el RQH. El muestreador SSOD se caracteriza por enviar un nuevo dato cada vez que la señal muestreada cambia en un valor δ con respecto a la última muestra enviada, como se observa en la Figura 2.
Este tipo de muestreo presenta un buen rechazo a la generación de eventos debidos al ruido en la señal muestreada, ya que la histéresis que se incluye evita la aparición de dichos eventos totalmente siempre y cuando el ruido medido no tenga una amplitud mayor a δ. Sin embargo, y debido también a la misma histéresis, las arquitecturas que contienen al SSOD pueden propiciar la aparición de ciclos límite, necesitando generalmente controladores bastante robustos. Una regla bastante simple en cuanto a su sintonización se introduce en (21), donde se recomiendan márgenes de fase mayores a 45º.
En cuanto al muestreador RQ, este se caracteriza por enviar un nuevo dato cada vez que la señal a muestrear cruza un nivel sin tener memoria de los anteriores cruces producidos, tal y como se muestra en la Figura 2.Esta estrategia permite el uso de controladores más rápidos que los usados en las arquitecturas con SSOD debido a la falta de histéresis que dificulte la reacción del controlador, pero, sin embargo, presenta la desventaja de ser muy sensible al ruido, produciendo una tasa de generación de eventos extremadamente elevada si la señal muestreada es muy ruidosa.
Teniendo en cuenta los puntos fuertes y débiles de las estrategias de muestreo SSOD y RQ, se propone usar una estrategia de muestreo intermedia, donde la generación de eventos será como la del muestreo SSOD pero reduciendo la histéresis. Esta estrategia se llama RQH y se muestra en la Figura 2. Cabe destacar, que el muestreo RQ es equivalente al muestreo SSOD pero con valor de histéresis 0, de ahí que el método propuesto lo consideremos un caso intermedio.
Este nuevo esquema de muestreo intermedio entre el SSOD y el RQ presenta virtudes y defectos de ambos a medida que sea más próximo a uno u otro. Al incluir una histéresis al muestreador RQ se está evitando la generación de eventos debidos al ruido, pero a su vez se está perjudicando la rapidez que el controlador puede llegar a tener. Lo mismo ocurre a la inversa, reducir la histéresis del SSOD contribuye a reducir el desfase en la señal que este muestreo introduce, aumenta la velocidad que los controladores pueden llegar a tener debido a la reducción de robustez necesaria y todo a cambio de reducir la amplitud del ruido que puede llegar a rechazar.
Para ilustrar el efecto de las diferentes técnicas de muestreo comentadas se incluye un ejemplo en la Figura 3, donde los muestreadores SSOD, RQ y RQH con una ratio entre la histéresis h y la cuantificación δ de 2/3, muestrean una señal sinusoidal a la que se añade ruido. Se puede observar que el número de eventos generado por los diferentes muestreadores aumenta a medida que se reduce el valor de la histéresis y que al aumentar el valor de la histéresis se incrementa también el retraso de la señal muestreada.

Fig. 3 Muestreo (rojo) de una señal seno, con y sin ruido (negro) con los respectivos eventos (azul).
3.- Ajuste de controladores PI con umbrales fijos
Tal y como se ha comentado con anterioridad, estos esquemas de muestreo tienen una influencia muy importante sobre la robustez respecto a la aparición de ciclos límite de los sistemas en los que se aplican. Esta robustez se puede caracterizar mediante el uso de técnicas de análisis como la función descriptiva. Para ello hay que tener en cuenta que todos los bloques que se encuentran antes del controlador C(s) en la Figura 1 pueden agruparse en un solo bloque, tal y como se muestra en la Figura 4 con el bloque EG-ZOH, el cual representa la no-linealidad que introduce el muestreador. De la misma forma todos los elementos lineales son considerados dentro de la función transferencial de bucle abierto 
Es sabido que la condición para la existencia de ciclos límite en el esquema de la Figura 4 viene dada por la ecuación (1), donde N es la función descriptiva de la no-linealidad representada por el bloque EG-ZOH. Por tanto, el sistema no presentará ciclos límite si los gráficos de y  en el diagrama de Nyquist no se interceptan.
en el diagrama de Nyquist no se interceptan.
 (1)
(1)
La función descriptiva del muestreador RQH viene dada por la ecuación (2), donde A es la amplitud de las oscilaciones sinusoidales y  es el número máximo de niveles cruzados por la oscilación.
es el número máximo de niveles cruzados por la oscilación.
 (2)
(2)
En la Figura 5 se puede observar la función descriptiva completa para muestreadores con cuatro valores diferentes de h/δ: 0, 1/3, 2/3 y 1. También se muestra la forma de una hipotética función de transferencia de bucle abierto G ol .

Fig. 5 1/N(A,h) de los diferentes muestreadores (negro). Función de transferencia de bucle abierto G ol hipotética (azul).
Gráficamente se puede interpretar que para el caso mostrado en la Figura 5 los lazos que contienen al muestreador RQ y los dos casos intermedios no oscilarán, pero sí lo hará el que contiene el SSOD. Sin embargo, entre los dos casos intermedios, el caso con h/δ=2/3 estará mucho más cerca de oscilar porque su función descriptiva está muy próxima a la función de transferencia en bucle abierto.
Para comprobar estos resultados se ha realizado una simulación donde el sistema se somete a un cambio de referencia, una vez estabilizado se incorpora una perturbación de tipo escalón y finalmente se simula el efecto de tener un error de medida sobre el sistema. Los resultados de dicha simulación se pueden observar en la Figura 6, donde efectivamente comprobamos que solamente el sistema con el SSOD presenta ciclos límite. Además, a medida que la histéresis se reduce se puede observar cualitativamente, en los casos donde no hay oscilaciones, que la generación de eventos debida al ruido es mayor.
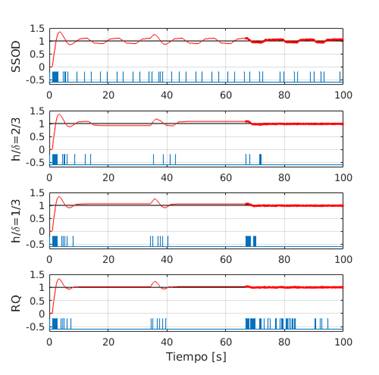
Fig, 6 Respuesta temporal (rojo) y eventos generados (azul) en G 1 frente a cambio de referencia (negro), perturbación y ruido.
En (19) fueron propuestas dos medidas formales de la distancia entre -1/N(A,h) y G ol . En concreto se trata de márgenes de ganancia (( h/( ) y de fase (( h/( ) que miden cuan cerca está el sistema de presentar ciclos límites. El margen de ganancia ( h/( es el incremento en la ganancia de G ol antes de alcanzar la intersección con 1/N y está definido por la siguiente ecuación:
 (3)
(3)
donde  y son los valores de y
y son los valores de y  para los cuales el cociente es mínimo y cumple la condición
para los cuales el cociente es mínimo y cumple la condición
Por otro lado, el margen de fase (h/( es la cantidad de fase mínima requerida por Gol para interceptar con cumpliendo la condición . O sea:
 (4)
(4)donde y  son los valores de
son los valores de  y para los cuales la diferencia
y para los cuales la diferencia  es mínima, cumpliendo la condición
es mínima, cumpliendo la condición 
Dichos márgenes se muestran gráficamente en la Figura 7. Las distintas trazas que forma el inverso negativo de la función descriptiva, correspondiente a distintos valores de m se han representado con colores diferentes.

Fig. 7 Forma de  para muestreadores con diferentes valores
para muestreadores con diferentes valores  en el diagrama de Nyquist con los márgenes de robustez y
en el diagrama de Nyquist con los márgenes de robustez y  .
.
Considerando los márgenes antes descritos, en (20) se presentó un método para la sintonía de controladores PI que garantiza la no intersección entre y y además asegura unos márgenes de robustez ante errores de modelado o variaciones en parámetros del proceso. El cálculo de los parámetros del PI con función de transferencia  se plantea como un problema de optimización con restricciones, como muestra la ecuación (5), donde y son márgenes de ganancia y fase clásicos, y el sub-índice denota los valores requeridos de cada parámetro de diseño.
se plantea como un problema de optimización con restricciones, como muestra la ecuación (5), donde y son márgenes de ganancia y fase clásicos, y el sub-índice denota los valores requeridos de cada parámetro de diseño.
 (5)
(5)
Para respuestas no oscilatorias la minimización del valor absoluto del error de control ( ) es equivalente a minimizar la integral del error (). Sin embargo, es preferible usar el último índice porque el
) es equivalente a minimizar la integral del error (). Sin embargo, es preferible usar el último índice porque el  está directamente relacionado con los parámetros del controlador a través de la ganancia integral () lo que facilita la solución del problema de optimización. La herramienta de software que se ha desarrollado, y que será descrita en las siguientes secciones, permite la solución del problema de optimización dado por la ecuación (5), obteniendo los paramentos del controlador de forma automática a partir de datos que describen los distintos elementos del lazo de control. Los lectores interesados pueden encontrar en (20) más detalles sobre el procedimiento usado para la solución del problema de optimización.
está directamente relacionado con los parámetros del controlador a través de la ganancia integral () lo que facilita la solución del problema de optimización. La herramienta de software que se ha desarrollado, y que será descrita en las siguientes secciones, permite la solución del problema de optimización dado por la ecuación (5), obteniendo los paramentos del controlador de forma automática a partir de datos que describen los distintos elementos del lazo de control. Los lectores interesados pueden encontrar en (20) más detalles sobre el procedimiento usado para la solución del problema de optimización.
4.- Herramienta de software para el ajuste de controladores RQH-PI
Para resolver el problema de optimización de la ecuación (5) se ha desarrollado una aplicación que facilita de forma considerable el ajuste de los controladores RQH-PI. La ventana principal de la aplicación se muestra en la Figura 8, la cual cuenta con varios elementos para la entrada de datos y la presentación de resultados.
En la parte izquierda de la ventana se encuentra el panel que permite definir todos los parámetros del sistema de control, cuyo esquema que se muestra en la parte superior derecha de la ventana. La función de transferencia  se define mediante vectores con los coeficientes de los polinomios del numerador y denominador en potencias decrecientes de la variable compleja , así como la introducción del retardo de tiempo en caso de que exista. Los parámetros del muestreador RQH, así como la ganancia y el tiempo integral del controlador PI se pueden introducir de forma manual. También se introducen en el panel los requerimientos de robustez para el diseño, expresados a través de los márgenes de fase y ganancias clásicos y respectos a la no-linealidad que introduce en el sistema el muestreador RQH. Además, se pueden definir los parámetros para la simulación: tiempo de simulación, periodo de integración numérica, tiempos en los que se aplica entradas de tipo escalón en la referencia
se define mediante vectores con los coeficientes de los polinomios del numerador y denominador en potencias decrecientes de la variable compleja , así como la introducción del retardo de tiempo en caso de que exista. Los parámetros del muestreador RQH, así como la ganancia y el tiempo integral del controlador PI se pueden introducir de forma manual. También se introducen en el panel los requerimientos de robustez para el diseño, expresados a través de los márgenes de fase y ganancias clásicos y respectos a la no-linealidad que introduce en el sistema el muestreador RQH. Además, se pueden definir los parámetros para la simulación: tiempo de simulación, periodo de integración numérica, tiempos en los que se aplica entradas de tipo escalón en la referencia  y en la perturbación
y en la perturbación  . En el panel también se muestran los valores de los índices de robustez, entre los cuales se incluye, además de los márgenes de ganancia y fase, la distancia mínima entre
. En el panel también se muestran los valores de los índices de robustez, entre los cuales se incluye, además de los márgenes de ganancia y fase, la distancia mínima entre  y
y
En la ventana de aplicación se incluyen varias gráficas. En la parte superior izquierda está el diagrama polar donde se incluye la función de transferencia de bucle abierto y . También se representan de forma gráfica en esa figura los márgenes de robustez a la no-linealidad RQH, así como la distancia mínima entre  y . En la parte inferior de la ventana se muestran las gráficas de respuesta temporal de las distintas señales del sistema de control. Por defecto aparecen la referencia
y . En la parte inferior de la ventana se muestran las gráficas de respuesta temporal de las distintas señales del sistema de control. Por defecto aparecen la referencia  y la salida , además de forma opcional se pueden mostrar el error , el error muestreado con el RQH () y la acción de control
y la salida , además de forma opcional se pueden mostrar el error , el error muestreado con el RQH () y la acción de control  , para lo cual hay que seleccionar las casillas en la parte inferior izquierda de la ventana. Los parámetros del controlador se pueden calcular mediante la resolución del problema de optimización (5) pulsando el botón Tune, actualizándose entonces de forma automática toda la información que aparece en las gráficas. La información de las gráficas se actualiza también cuando se modifica cualquiera de los parámetros del sistema de control en el panel de la izquierda.
, para lo cual hay que seleccionar las casillas en la parte inferior izquierda de la ventana. Los parámetros del controlador se pueden calcular mediante la resolución del problema de optimización (5) pulsando el botón Tune, actualizándose entonces de forma automática toda la información que aparece en las gráficas. La información de las gráficas se actualiza también cuando se modifica cualquiera de los parámetros del sistema de control en el panel de la izquierda.
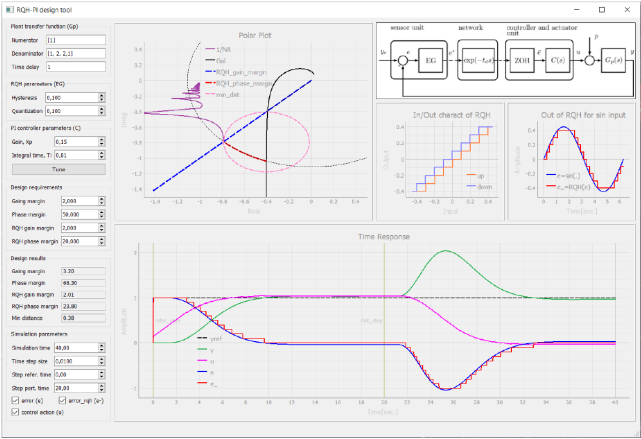
Además de la información antes mencionada, se muestran también en la ventana de la aplicación dos gráficas relacionadas con el muestrador RQH, las cuales se ubican debajo de la figura con el esquema del sistema de control. La figura más a la izquierda muestra la característica de entrada salida mientras que a su derecha se representa la respuesta del muestreador ante una entrada de tipo sinusoidal. Estas dos gráficas permiten una mejor compresión del funcionamiento de muestreador.
6.- Conclusiones
En este trabajo se han presentado los resultados más recientes en el ámbito de los controladores PID basados en eventos generados mediante cruces de umbrales fijos. Este tipo de controladores se puede usar en sistema de control en red con sensores remotos con el objetivo de reducir el número de mediciones necesarias para el control en bucle cerrado. Con ello se consigue reducir el tráfico de datos por las redes de comunicaciones que unen sensores, controladores y actuadores en los sistemas de control distribuidos.
Se ha presentado una herramienta de sotfware que permite el diseño y la simulación de este tipo de sistema de control, la cual proporciona el ajuste óptimo del controlador mediante la solución de un problema de optimización con restricciones en la robustez del lazo de control. Para ello se han tenido en cuenta algunos resultados teóricos basados en la aplicación de los métodos de respuesta de frecuencia que han permitido la extensión de conceptos de la teoría clásica de control, como los márgenes de ganancia y fase, al caso del muestreo RQH. En este sentido la herramienta presentada en este trabajo se puede considerar un paso importante para la implantación práctica de este tipo de sistemas de control.

