










 Servicios personalizados
Servicios personalizados Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkIntroducción
La afluencia de automotores en las grandes ciudades representa un factor crítico al momento de la movilidad, sobre todo al momento de obtener un sitio adecuado para estacionar los automotores, el propósito de esta investigación está relacionado con el mal estacionamiento de los automotores dentro de los parqueaderos de la UMET, la cantidad de autos que utilizan los sitios de parqueo crece ascendentemente en especial en las horas pico considerando una afluencia entre 20 a 40 vehículos, además de carecer de un sistema de control sobre los autos y sus propietarios.
Para mitigar estos problemas, la automatización de los controles resulta ser de gran ayuda para los usuarios y personas a cargo de los estacionamientos.
Un equipo orientado a recopilar información de los autos, a fin de obtener los datos personales del conductor para evitar la búsqueda manual del propietario, debido a que existen ocasiones en las cuales los usuarios se parquean de manera incorrecta evitando que los demás usuarios se retiren o accedan al estacionamiento, todo esto provoca una búsqueda del propietario en cada curso de la universidad causando molesta tanto a los docentes como a los alumnos.
El equipo está diseñado en base a las redes neurales con la finalidad de simular las redes de un ser humano capaz de reconocer las placas de un auto, dicha red neuronal recibe la información por el dispositivo de captura de imagen (Cámara).
Un equipo de reconocimiento óptico tiene múltiples aplicaciones desde la transcripción de caracteres hasta el uso profesional utilizado por las autoridades a fin de corroborar datos o generar infracciones.
La carencia de un sistema de control de entrada / salida en el estacionamiento de la universidad metropolitana presenta grandes complicaciones al momento de identificar al propietario de un vehículo, esto debido a una inexistencia de registros físicos o virtuales en los cuales se pueda encontrar dicha información. En consecuencia, al momento de presentarse un percance con el vehículo de un usuario la identificación del propietario toma mucho tiempo.
Por otra parte, la infraestructura presente en la UMET sede coruña no dispone de un único acceso para los vehículos por ende se presentan casos de obstrucción entre usuarios sin posibilidad de identificar a dicho propietario del vehículo mal aparcado con el fin de ser notificado para resolver el inconveniente.
Desarrollo
Para llevar a cabo estas operaciones, el Oficial de Seguridad designado dispone del sistema ANPR(Reconocimiento automático de Matriculas) integrado en un dispositivo, el proceso inicia cuando un vehículo ingresa a los parqueaderos de la UMET, dicho vehículo deberá ser escaneado con el dispositivo, el cual analiza la imagen para determinar el área que contiene la matricula una vez, obtenida la matricula, se realiza la segmentación de sectores de imagen que contiene la matrícula para proceder a analizar carácter por carácter en búsqueda de opciones similares en su base de conocimiento, encontrado todos los caracteres se procede a buscar en la base de datos para determinar las tareas a realizar.
Si los caracteres ingresados corresponden a uno de los registros de la base de datos, el sistema entregara estos datos al usuario a través de la interfaz del dispositivo. Caso contrario, si los caracteres de la placa no se encuentran en la base de datos, el sistema procede a solicitar los respetivos datos para el ingreso del nuevo auto, es decir, nombre del usuario y teléfono, una vez ingresado se guarda en la Base de datos, además se mostrará en la interfaz en nuevo ingreso de vehículo.
De acuerdo con Somolindos Sánchez (2002), se refiere a la visión por computadora como la interpretación de escenas a partir de imágenes recolectadas por una cámara utilizando la potencia de procesamiento integradas en un ordenador digital, tiene múltiples funcionabilidades como la clasificación de cultivos, asistencia en cartografía, monitorización de recursos naturales, apoyó al diagnóstico medio etc.
Sistema de Adquisición de imágenes está compuesto por dos partes:
Hardware: es el sistema de adquisición de imagen, encargado de todo el proceso de formación y captación de imágenes, está apoyado en un mecanismo que transmite la información del mundo real hasta la memoria digital de un computador, la principal herramienta que interviene para la captación de imágenes es la cámara.
Software: se emplea un algoritmo de procesamiento y reconocimiento de imágenes, basado en una red neuronal que depende del entrenamiento de algoritmos que revisan constantemente la base de conocimiento para tener una predicción más acertada (Suchitra, et al., 2016).
Es de vital importancia disponer de un entorno vanguardista en el ámbito de la tecnología para el control automatizado de las áreas de una entidad, así por ejemplo los parqueaderos, en los cuales es de vital importancia tener el control sobre todo lo que sucede dentro y fuera de esta área, el control humano en varios casos es realizado de manera parcial por lo tanto la integración de nuevas tecnologías para ayudar a mejorar los procesos presenta diversos beneficios, por lo tanto el objetivo principal de esta tesis es incorporar tecnologías que facilite llevar control sobre los autos y sus dueños.
En el mercado los sistemas ANPR tienen amplia gama, pero la población ignora la existencia de esos sistemas, por lo tanto, a continuación, se detalla los siguientes dispositivos encontrados en el mercado (Tabla 1, Figura 1).
Tabla 1 Cámara ANPR (DS-2CD4A26FWD-(IZHS) Hikvision.
| Características cámara Hikvision | |
| Modelo | DS-2CD4A26FWD. |
| Costo | 250 usd. |
| Características | Cámara de 2MP. |
| Distancia de captura: 50. | |
| Puerto SD. | |
| Puerto de Red 100Mps. | |
| Sistema 3os. | |
 Fuente: Hangzhou Hikvision Digital Technology Co., Ltd. (2016)
Fuente: Hangzhou Hikvision Digital Technology Co., Ltd. (2016)
Fig. 2 - Cámara ANPR (DS-2CD4A26FWD-(IZHS)) Hikvision.
La cámara ANPR de Haskivision (Tabla 2, Figura 2) dispone de reconocimiento optico de caracteres, resistente al agua y dispone de vision noctura, esta basada en el sistema 3OS que trabaja con AT&T es un sistema enfocado en la seguridad, con actualizaciones constantes.
Tabla 2 Cámara ANPR IP.
| Características cámara ANPR IP | |
|---|---|
| Modelo | I+D3. |
| Costo | 320. |
| Descripción | Cámara 2MP. |
| Alcance: 45m. | |
| Bluetooth. | |
| Sistema 3LPR. |

La función de esta cámara es (Tabla 3, Figura 3) identificar los automotores que ingresen a los parqueaderos y proporcionar una aplicación móvil a los usuarios vía bluetooth, Opera bajo el sistema 3LPR para el reconocimiento de placas, el sistema es adaptable todo tipo de placas sin importar el tipo de automotor que se escanee.
Tabla 3 - Sistema ANPR/LPR de Lilin.
| Características cámara ANPR LILIN | |
|---|---|
| Modelo | LPR 6.8. |
| Costo | 360 usd. |
| Descripción | Regiones Eurozona, US, China, Rusia, Japón, etc. |
| Cámara: 2mp. | |
| Velocidad Max para captura: 10km/h. | |
| Soporta 8 canales (cámaras). | |
| Requerimientos mínimos | Windows 7. |
| Core I7. | |
| Ram 4Gb. | |

Lilin es una tecnología que realiza (Tabla 4, Figura 4) el proceso a partir de imágenes digitales basándose en pixeles, para realizar el filtrado de matrículas, dispone un sistema para agregar matrículas y restringir accesos por medio de una “Black list” además se puede realizar varias listas o grupos y permite mejorar las imágenes con poca visibilidad.
Tabla 4 - Cámaras HD IR (DF5200HD-IR-ANPR).
| Características cámara HD ANPR | |
|---|---|
| Modelo | IR DF5200HD. |
| Costo | 263 usd. |
| Descripción | Cámara: 2MP. |
| Alcance 50m. | |
| Sistema SEDOR ANPR. | |
 Fuente: Interempresas Media, S.L.U. - Grupo Nova Àgora (2015)
Fuente: Interempresas Media, S.L.U. - Grupo Nova Àgora (2015)
Fig. 5 - Cámaras HD IR (DF5200HD-IR-ANPR).
La cámara descrita anteriormente Figura 5), dispone de visión nocturna y optimizador de imagen, para realiza los procesos de reconocimiento óptico de caracteres se basa en el sistema SEDOR el cual realiza el reconocimiento de matrícula, almacena a información en una base de datos además de trabajar en conjunto con Windows.
Selección de Tecnologías
Comparativa de Placas
Raspberry Pi 3 B+
Arduino Mega
Ventajas
Bajos costos de adquisición en el mercado.
Es de código abierto.
Desventajas
Requiere de la compra de múltiples módulos para su correcto funcionamiento.
El uso excesivo de módulos genera que el tamaño del equipo sea mayor, impidiendo que sea fácilmente transportado.
Falta de puertos USB en la placa.
Banana Pi m64
Odroid
Orange Pi Zero
La placa utilizada es Raspberry Pi 3 B+ la cual nos va a permitir desarrollar el sistema de reconocimiento de placas automotrices (Zhang, et al., 2020).
En conjunto con Upton & Halfacree (2013), se establece la placa Raspberry Pi como un, es un computador compacto de bajo consumo energético actualmente la placa consta de dos modelos (A y B+), compuestos de manera similar con pequeñas en el modelo B+ en el ámbito del procesamiento, en el núcleo de la placa se encuentra el módulo system-on-chip (Soc) Broadcom BCM2837, es el encargado de realizar los procesos generales, renderización de gráficos además de las entradas y salidas que componen el cuerpo de la placa, uno de los puntos en los que destaca Raspberry Pi su sistema operativo al contrario de equipos convencionales integrados con sistemas operativos de código cerrado como son Windows o MacOS, esta placa integra el sistema Linux, explícitamente Raspbian, el cual es de código libre, dispone de múltiples características las cuales son (Figura 6):

Contamos con una cámara de 1.3 mega pixeles las servirá para reconocer y leer las placas de los automóviles (Figura 7).

Para la visualización del sistema disponemos de un Monitor de 7 pulgadas táctil lo que facilita su uso, suprimiendo el uso del mouse y teclado (Figura 8).

El sistema operativo Raspbian está contenida dentro de una memoria Micro SD de 32Gb, clase 10 que es la recomendada para este tipo de proyectos (Figura 9).

Se emplea dos baterías recargables una de 3.7V a 2600mAh que alimentará de energía a la placa Raspberry Pi 3 B+ la otra de 3.7V a 3800mAh que servirá para alimentar el monitor de 7 pulgadas, ambas con sus respectivos diodos led que nos muestra sus niveles de carga (Figura 10 y 11).


El case agrupa todos los componentes haciendo que sea más fácil de transportar (Figura 12).

Especificaciones de software de Rasberry PI 3 B+.
Raspbian
Es uno de los sistemas operativos que acepta Raspberry, dicho sistema está basado en GNU/Linux llamado Debian, es un software libre adaptable que se encuentra presente en múltiples dispositivos es considerado un sistema operativo universal debido a sus exigencias nulas en cuando al hardware necesario, además de ser un sistema que se encentra disponible para cualquier usuario y dispone de una extendida comunidad la cual brinda una excelente ayuda al momento de solucionar problemas, cuenta con un sistema de seguridad elaborado por varios desarrolladores creando un sistema perfecto en cuando a seguridad se trata, al momento de trabajar con Raspberry es un sistema adaptable con una amplia variedad de aplicaciones las cuales permiten trabajar infinidad de proyectos (Sun, et al., 2018).
En comparación de los sistemas y cámaras presentes en el mercado, el sistema que se propone en este proyecto representa un menor costo ya que las partes que componen el sistema no superan los valores presentes en el marcado actual, además del acoplamiento a la entidad para la cual se la está creando, es decir la interfaz será enfocada propiamente para la UMET.
Lenguajes de programación para el desarrollo de la Interfaz Visual.
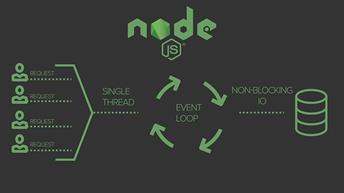
Es un entorno de desarrollo encargado de las peticiones por parte del usuario y entregar resultados solicitando al servidor, por medio de un único hilo, ideal para respuestas en tiempo real (Figura 13).
Es el lenguaje encardado de formular las respuestas de la petición realizada por el usuario, que se va a emplear en el desarrollo del sistema de identificación de placas automotrices.
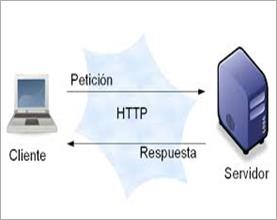
La arquitectura cliente-servidor C/S es la relación entre procesos realizados en distintos computadores. El servidor (S) es un proveedor de servicios y el cliente (C) es un consumidor de servicios e interactúan por un mecanismo de pedido de mensajes y respuestas. (Porto & Gardey, 2016)
De acuerdo con lo mencionado anteriormente se dice que la arquitectura cliente servidor tiene dos partes esenciales por un lado el servidor el cual es un equipo de amplia capacidad que actúa como un depósito de datos o aplicaciones, por otra parte, está el cliente que son estaciones de trabajo las cuales solicita información y/o servicios al servidor a fin de resolver una tarea (Figura 14).
La UMET al igual que múltiples edificaciones presentes en las grandes ciudades dispone un área específica para sus clientes, usuarios o empleados, en el cual pueden aparcar sus vehículos, con el objetivo de mejorar la seguridad para los usuarios y mantener una organización de los espacios, estos aparcamientos disponen de un personal encargado netamente de evitar inconvenientes a los usuarios, al tratarse de varios vehículos surgen muchos problemas para una sola persona así como: Vehículos mal aparcados así también Vehículos no autorizados utilizando las instalaciones.
A fin de minimizar estos inconvenientes a los usuarios se plantea el apoyo con un dispositivo tecnológico el cual facilita el registro e identificación de todos los vehículos presentes en las instalaciones, de esta forma todos los vehículos son registrados de modo que se dispone de la respectiva información para contactar con el propietario en caso de que el vehículo requiera corregir un inconveniente con las normativas establecidas
Al ser un dispositivo compacto que no requiere estar conectado a una terminar es fácil de trasportar haciendo de una apariencia muy similar a una Tablet, al disponer de una red neuronal los procesos de captura de datos son más precisos y rápidos, ideal para minimizar el uso del tiempo del propietario del vehículo (Tabla 5).
Tabla 5 - Descripción de requisitos según su funcionalidad.
| Valor | Descripción |
|---|---|
| Alta | Se Maneja 5 transacciones, la visualización, creación, captura, modificación y eliminación. |
| Interactúan 2 entidades del sistema. | |
| El actor accede a la interfaz el sistema se encarga de comunicarse con la red neuronal a fin de recibir una respuesta y mostrarla para poder interactuar con el resultado. | |
| Media | En este requisito interactúan 4 transacciones encargadas del registro, búsqueda, edición y visualización. |
| Interactúan 2 entidades del sistema. | |
| EL actor accede a la interfaz web realiza peticiones y el sistema devuelve la información solicitada | |
| Baja | Dispone de 3 transacciones encargadas de Registro, búsqueda, y visualización. |
| Interactúan 2 entidades del sistema. | |
| El actor inicia el proceso y la interfaz solicita servicios, recibe peticiones e informa de los estados de la información |
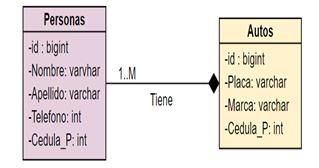
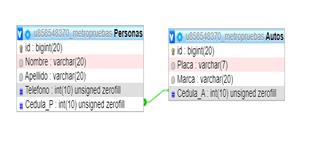
Modelo conceptual de datos en el cual se describen las relaciones entre las entidades del negocio Personas y Autos (Figura 15).
Modelo físico de datos donde se ve la transformación a datos derivada del modelo Conceptual de Datos (Figura 16).
A continuación, se muestra el diagrama de componentes de a cuerdo a la arquitectura implementada evidenciándose una compacta y solida implementación de todos los componentes del software (Figura 17).
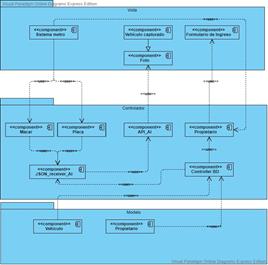
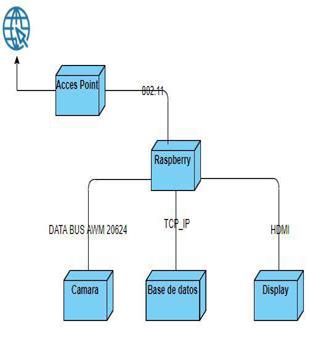
Como se puede apreciar en la figura 18 el diagrama de componentes muestra un despliegue sencillo de las funcionalidades y hardware del proyecto implementado, ayudando así a su fácil despliegue.
Factores importantes que se derivan de la investigación a partir de un analisis profundo de estos son (Tabla 6 y 7):
Tabla 6 - Descripción de Factores Técnicos.
| ID | Factor Técnico | Peso () | Valor () | Descripción |
|---|---|---|---|---|
| FT1 | Sistema Centralizado | 1 | Se define como sistema centralizado al proceso de cómputo realizado en un nodo central, el equipo en sí mismo puede manejar todos los periféricos físicamente conectada al terminal. Consiguiendo mayor seguridad y protección de información | |
| FT2 | Rendimiento | 1 | Capacidad de tiempo de respuesta ante las solicitudes realizadas por parte del actor. | |
| FT3 | Validaciones | 0 | Se establece a los campos que requieren ser validados para completar las funciones del sistema | |
| FT4 | Librerías Externas | 1 | Adición de componentes externos (API) servicios proporcionados por terceros para agregar funcionalidades. | |
| FT5 | Control de seguridad | 1 | Control de acceso a información por parte de los módulos instanciados | |
| FT6 | Capacitación | 1 | Entrenamiento precio para el correcto manejo del software y hardware |
Tabla 7 - Factores Ambientales.
| ID | Factor ambiental | Peso (0.5 - 2) | Valor (1,2,3) | Descripción |
| FA1 | Manejo de RUP | 1 | Toma el valor definido | Conocimiento del proceso para implementar la metodología |
| FA2 | Integración de POO | 0.5 | Toma el valor definido | Experiencia con el manejo de tecnologías orientadas al desarrollo de aplicaciones orientadas a objetos. |
| FA3 | Capacidad de análisis | 1 | Toma el valor definido | Se enfoca en la objetividad y pericia que dispone el equipo de trabajo para la resolución del problema. |
| FA4 | Dificultad del lenguaje de programación | 1 | Toma el valor definido | La complejidad del estudio y manejo sintaxis de un determinado lenguaje de programación. |
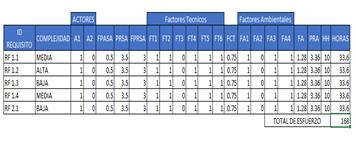
A continuación, se mostrará el método de estimación establecido para poder determinar la factibilidad de este proyecto de investigación (Figura 19).
Encendemos la Raspberry para ejecutar el sistema operativo Raspbian (Figura 20).

Abrimos el navegador e ingresamos a la url “http://localhost:1880/ul” donde se abrirá una ventana donde se va a capturar los datos de la placa del vehículo ubicado en el parqueadero de la Universidad Metropolitana (Figura 21).
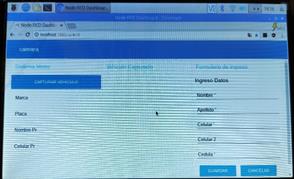
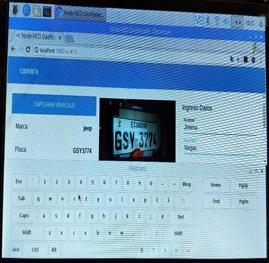
Para realizar la captura de la placa del vehículo es necesario dirigirnos al botón “Capturar Vehículo” donde tomará las letras y número de placa como también la marca del vehículo, la cámara de la Raspberry estará activa durante 3 segundos, en el cual el guardia de turno debe colocarse al frente del vehículo mal estacionado, para posteriormente ingresar los datos del estudiante.
Los campos por llenar son:
Finalmente pondremos en el botón guardar para que se registren los datos del estudiante dueño del vehículo.
En el caso de que los datos del estudiante ya hayan sido tomados previamente o en ocasiones anteriores, se desplegaran automáticamente toda la información cuando se capture la placa de su vehículo (Figura 22).
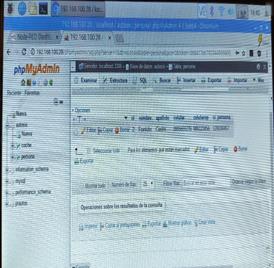
Todos los registros son almacenados en la base de datos donde pueden ser modificados y agregados manualmente, al momento que el usuario escanea la placa de un vehículo, automáticamente se genera una búsqueda para mostrar los datos de la mismo o de lo contrario crea una tabla para almacenar los nuevos datos del vehículo (Figura 23).
El sistema de identificación de placas automotrices al ser un dispositivo portátil cuenta con 2 baterías que se encargan de alimentar la Raspberry y la pantalla táctil de 7 pulgadas. La duración de las baterías es variable, dependiendo el uso que se les vaya a realizar, de acuerdo con las pruebas realizadas podemos obtener los siguientes resultados:
En un uso constante las baterías llegan a tener una autonomía promedio de 4 horas. En uso parcial y modo de reposo las baterías disponen de una autonomía superior de hasta 6 horas (Figura 24).
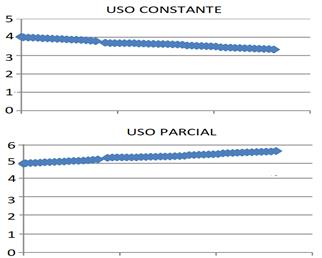
El tiempo de carga de las baterías es de aproximadamente 2 horas, cada una dispone de indicadores led que nos muestran el estado actual de carga en las baterías.
Ambas baterías cuentan con pro0tección ante posibles cambios de voltajes o de sobrecalentamiento.
Conclusiones
En el presente proyecto se ha implementado el uso de inteligencia artificial para la lectura de placas vehiculares, a fin de crear un dispositivo capaz de captar dicha información y guardarla para acosarla con información de los propietarios. El sistema presenta grandes posibilidades de escalabilidad, en este proyecto se abordó una de todas esas posibilidades debido a que el hardware es una placa programable diseñada para interactuar con sensores, motores, etc. Se puede incorporar muchas más funciones al sistema si así se lo requiere.
De acuerdo con los ejemplos propuestos el sistema de peaje se encuentra acompañado de la tecnología escalable puede ser de mucha utilidad en diversas entidades o empresas.

